

Pneumatic redundancy self-sensing multi-degree-of-freedom flexible nimble finger
A technology with flexible fingers and degrees of freedom, applied in the field of intelligent robots, can solve problems such as poor target adaptability, low safety, and insufficient grasping force, achieve a wide range of degrees of freedom and bending conditions, increase work space, and work space Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings.
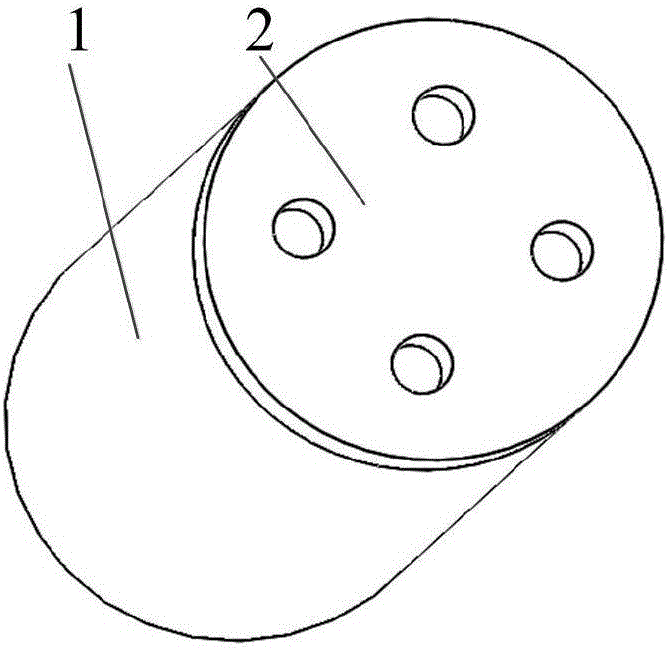
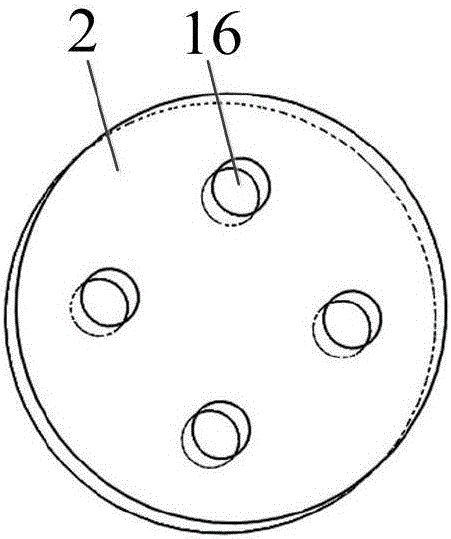
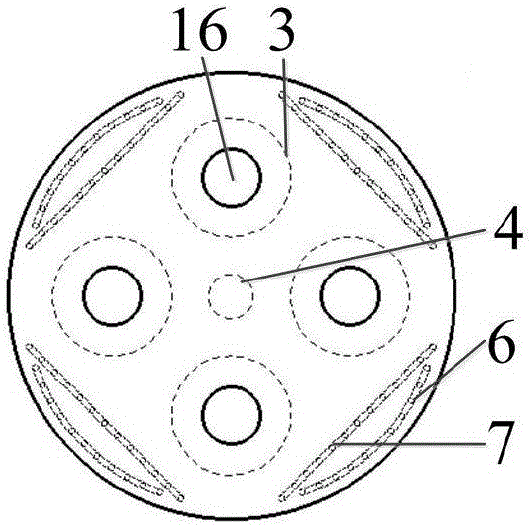
[0021] A pneumatic self-sensing redundant multi-degree-of-freedom flexible dexterous finger of the present invention, such as figure 1 - As shown in -4, it includes a cylindrical flexible finger base 1 and a truncated conical flexible connecting base 2 that is as circular as the cylindrical flexible finger base 1. The structure of the flexible connecting base 2 of the flexible finger base 1 is made of flexible silicon rubber or Other high-elastic materials that meet the performance requirements; the flexible finger base 1 forms four aerodynamic cavities 3 that are evenly distributed along the circumference in the axial direction through integral molding technology, and the aerodynamic cavities 3 are cylindrical. One end of the connecting base 2 is open, and the other end is closed; a curved inner core 4 is installed on the axis of the flexible finger base 1, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More