

Variable-rigidity mechanism based on geometrical features
A technology with geometric characteristics and variable stiffness, applied in the field of robotics, can solve the problems of complex structure, poor linearity, and low position accuracy of variable stiffness mechanisms, and achieve the effects of good linearity, improved control accuracy, and convenient layout.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
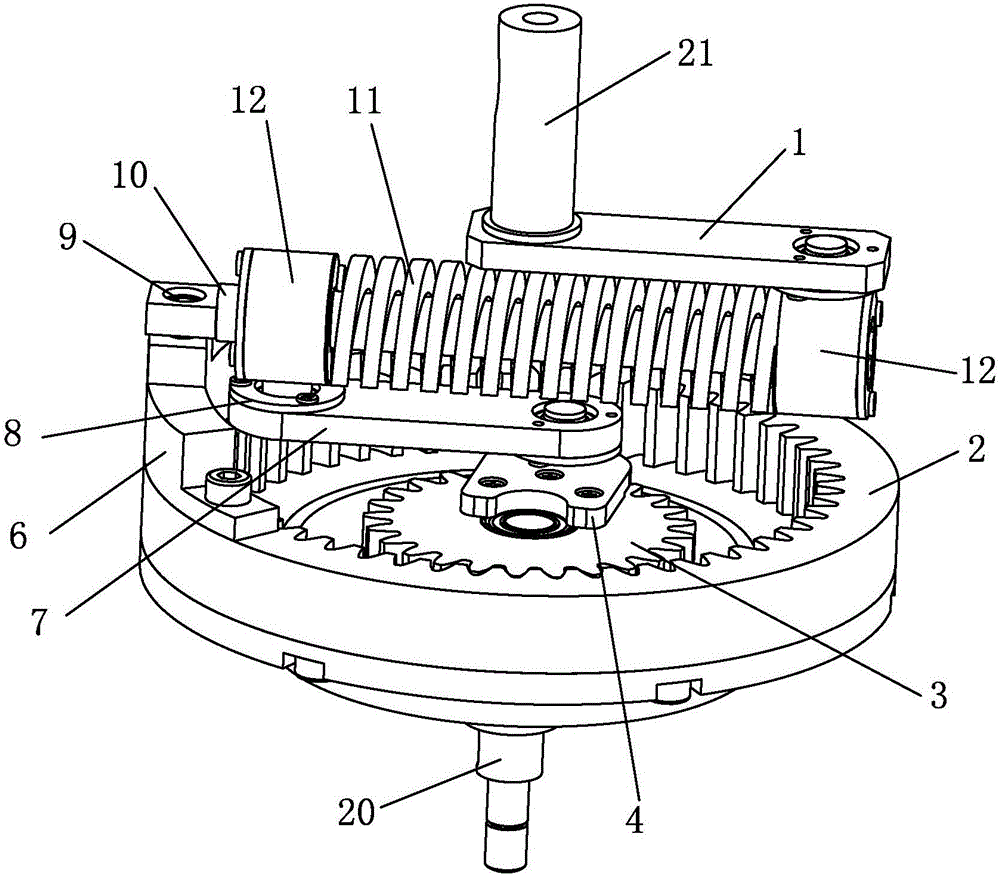
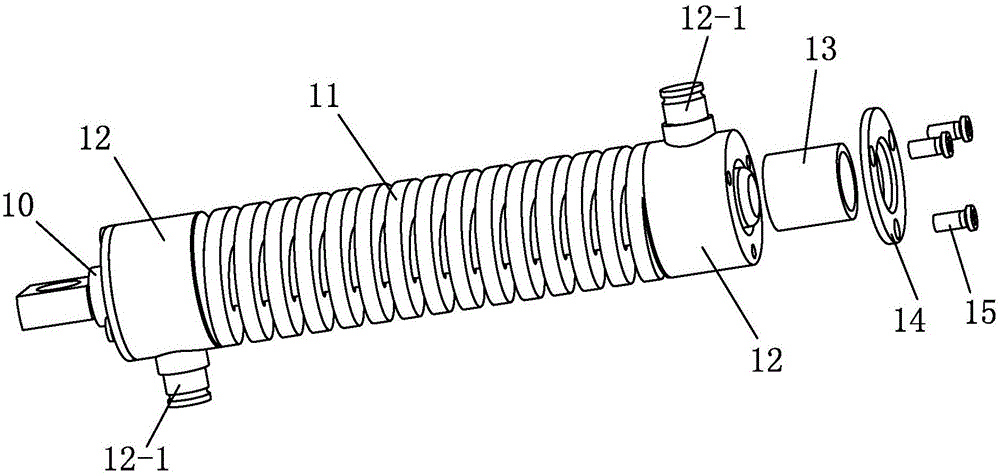
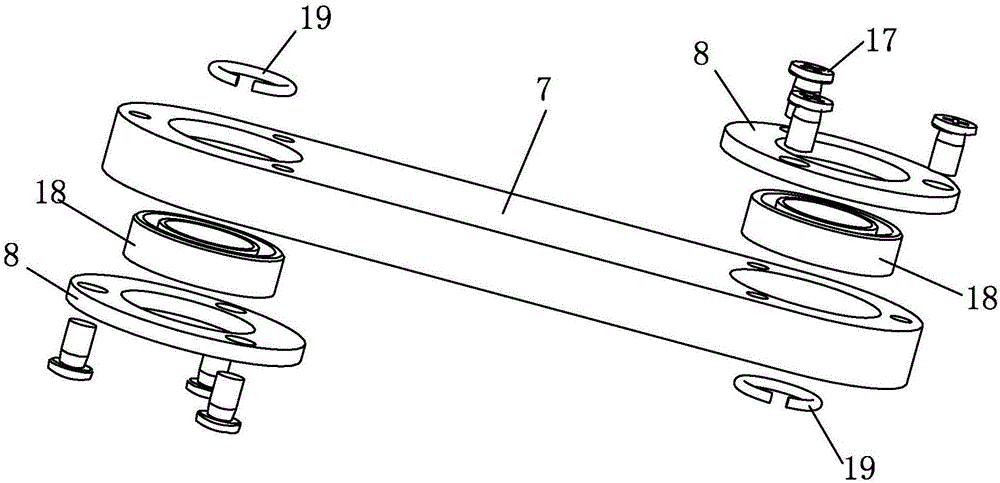
[0019] combine Figure 1-Figure 3 Explain that a variable stiffness mechanism based on geometric characteristics in this embodiment includes an output rod 1, a rigidly adjustable ring gear 2, a fulcrum gear 3, a fulcrum frame 4, a fulcrum rod 7, an intermediate rod 10, a spring 11, a bushing 13 and two sliders 12;
[0020] The two ends of described intermediate bar 10 are respectively equipped with a described slide block 12, and the described intermediate bar 10 that is positioned between two described slide blocks 12 is provided with spring 11, and is set between slide block 12 and intermediate bar 10. There is a shaft sleeve 13, and the shaft sleeve 13 is axially positioned by the bearing end cover 14 installed on the slider 12;
[0021] The upper end of the rigidly adjustable main shaft 20 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More