

A High Torque Compact Manipulator Joint
A robotic arm and compact technology, applied in the field of robotic arms, can solve the problem of not having large output torque mechanical arm joints at the same time, achieve good integration and system joint matching, reduce mass, and realize the effect of compact joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] Further illustrate the present invention below in conjunction with accompanying drawing.
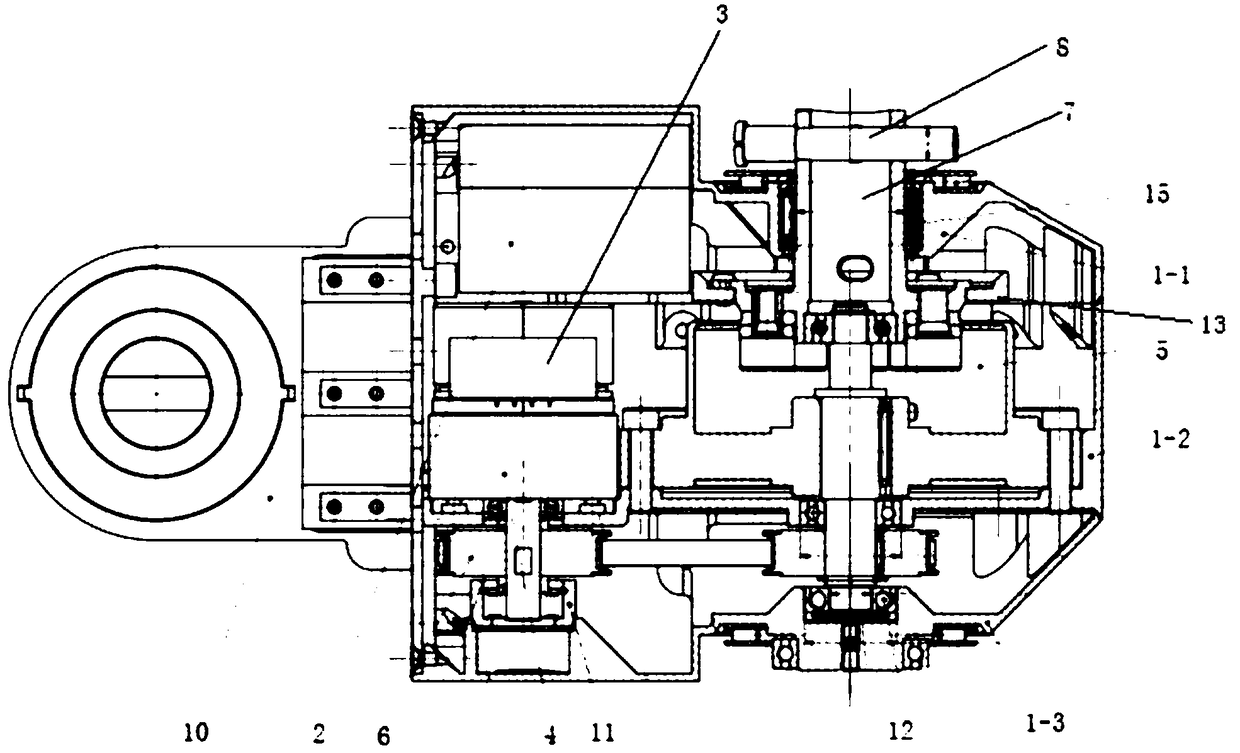
[0048] Such as Figure 1-3 As shown, a high-torque compact mechanical arm joint includes: joint housing 1, control electrical box 2, motor 3, high-speed reducer 4, low-speed reducer 5, synchronous pulley 6, output shaft 7, joint connection Shaft 8 , second connecting plate 9 , first connecting plate 10 , bearing seat 11 , first bearing 12 , grating ruler 13 , reading head 14 , second bearing 15 and intermediate connecting plate 16 .
[0049] Wherein, the joint housing 1 is a nearly cylindrical hollow structure. In order to facilitate disassembly and assembly, the joint housing 1 can be composed of multiple parts, and the specific combination method can be determined according to actual needs. Usually the joint shell 1 comprises an upper shell 1-1, a middle shell 1-2 and a lower shell 1-3, the middle shell 1-2 is composed of an integrally formed connecting plate and a fixing plate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More