

Marine crane automatic-control experimental system
A technology for marine cranes and experimental systems, which is applied to the testing of machines/structural components, measuring devices, instruments, etc., can solve the problems of complex controller structure, discounted transmission accuracy, and immaturity, so as to improve reliability and practicability. , Improve mechanical and control accuracy, simple and effective transmission mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
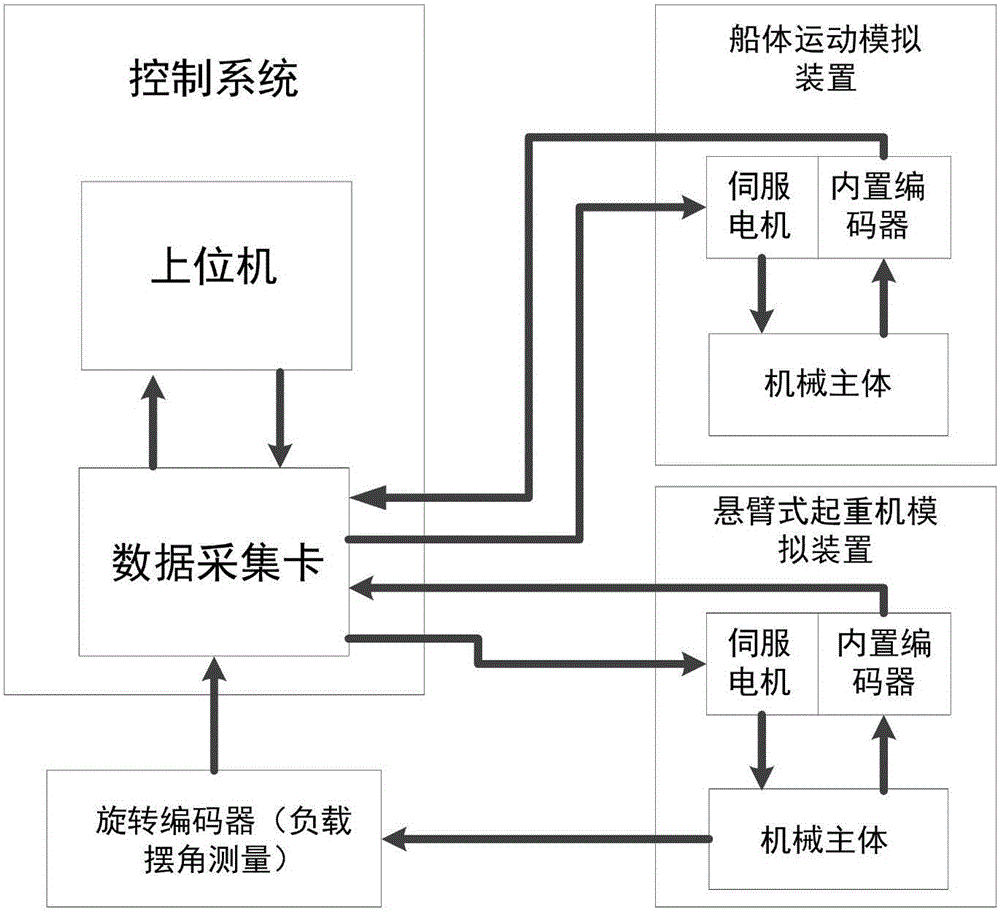
[0031] figure 1 It is a control flow schematic diagram of an automatic control experiment system for a marine crane provided by the present invention. The experimental system includes a crane simulation device, a hull motion simulation device, a motion state measurement device and a control system, among which:
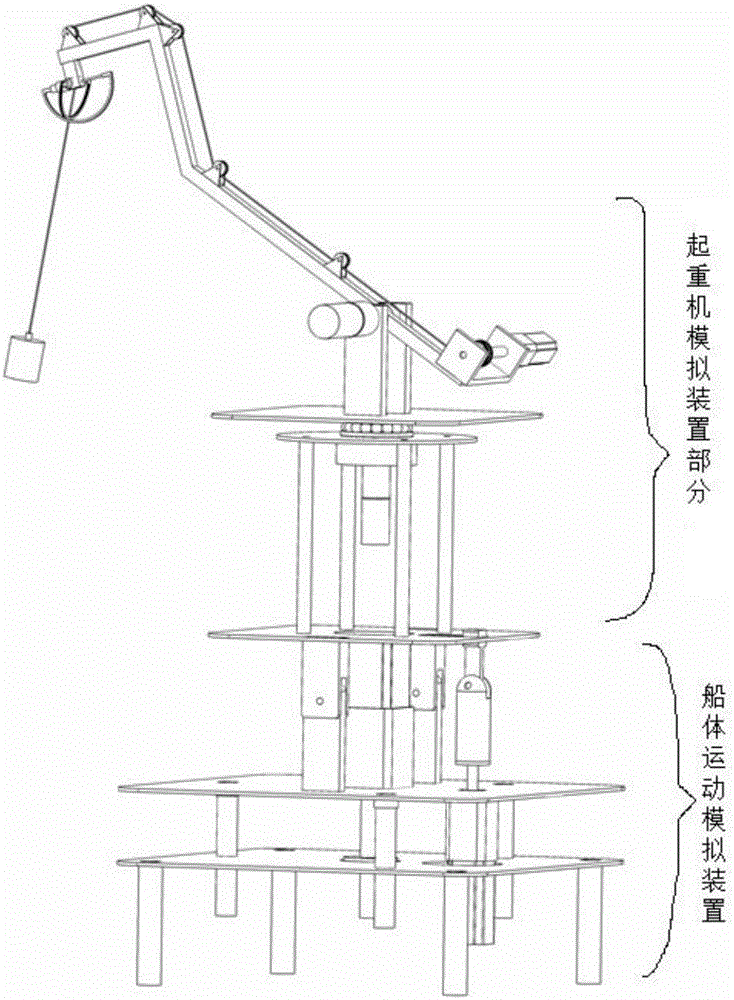
[0032] Crane simulation device: used to simulate the motion characteristics of a real crane (including the pitching motion and slewing motion of the crane boom, as well as the lifting and swinging of the load), and is also the controlled subject of the whole system; the mechanical structure diagram of the crane simulation device is as follows Figure 5-6 As shown, including the boom 2, (multiple) wiring pulleys 1 are installed on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More