

System and method for location communication and monitoring emergency control for underwater robot
An underwater robot and emergency control technology, applied in general control systems, program control systems, control/regulation systems, etc., can solve the problems of single function, small integration, affecting the safety of recovery and positioning, and improve safety and reliability. The effect of timeliness, optimized utilization, fast and reliable communication
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
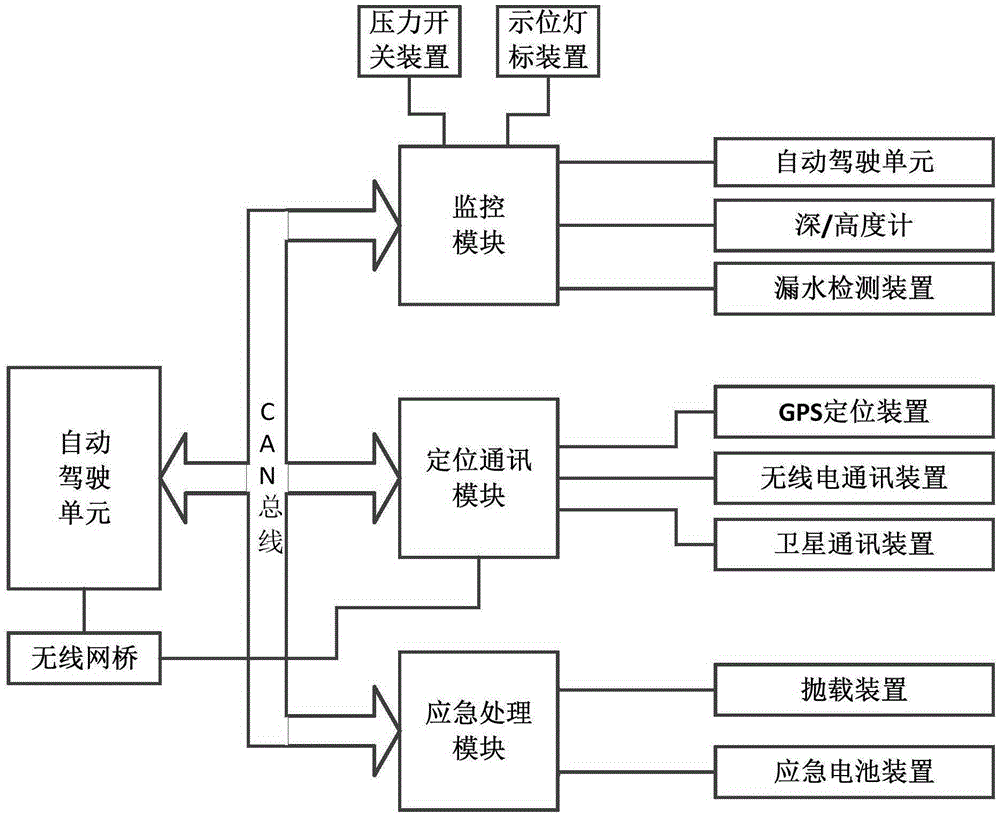
[0056] Such as figure 1Shown is the overall structure block diagram of the present invention. The positioning communication and supervision emergency control system for underwater robots is composed of a positioning communication module, a monitoring module and an emergency treatment module, and realizes information interaction, control and management with the automatic driving unit through the CAN bus. The positioning communication module is connected with the GPS positioning device, radio communication device, and satellite communication device. In addition, the module is connected with the automatic driving unit through the wireless network bridge device to realize the GPS timing and positioning of the underwater robot, and the radio communication between the surface console and the underwater robot. Communication, satellite communication,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More