Visual image feature extraction and matching method based on ORB and active vision
An image feature extraction, active vision technology, applied in character and pattern recognition, instrument, calculation and other directions, can solve the EKF dimension disaster and other problems, achieve the effect of shortening the operation time, meeting real-time performance, and good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0035] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
[0036] ORB (Oriented Brief) comes from the article "ORB: an efficient alternative to SIFT orSURF", which is a new corner detection and feature description algorithm.
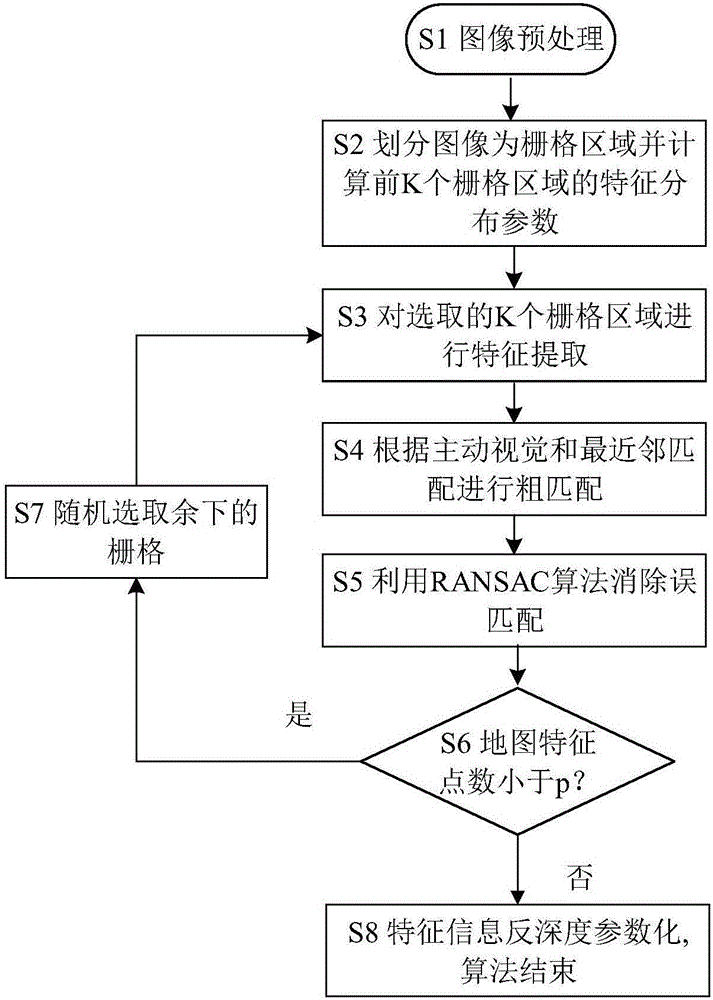
[0037] figure 1 It is a flow chart of the visual image feature extraction and matching method based on ORB and active vision in the present invention.
[0038] In this embodiment, the experimental images are image sequences of the surface of cardiac soft tissue collected by a monocular endoscope. The image sequence resolution is 320×240, and 30 frames of images are taken per second. The internal parameters of the endoscope are: f u =530.9003,f v =581.00362, u 0 =136.63037, v 0 =161.32884,k 1 =-0.2865,k 2 = 0.29524. The hardware and software environment used in the experiment is: Intel(R) Core(TM) i5-2450M@2.5GHz, memory 4G, Windows 7 system, and implemented in MATLAB 201...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com