Visual image feature extraction and matching method based on orb and active vision
An image feature extraction and active vision technology, which is applied in character and pattern recognition, instruments, calculations, etc., can solve problems such as EKF dimension disaster, and achieve the effects of shortened operation time, small amount of algorithm calculation, and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0035] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
[0036] ORB (Oriented Brief) comes from the article "ORB: an efficient alternative to SIFT orSURF", which is a new corner detection and feature description algorithm.
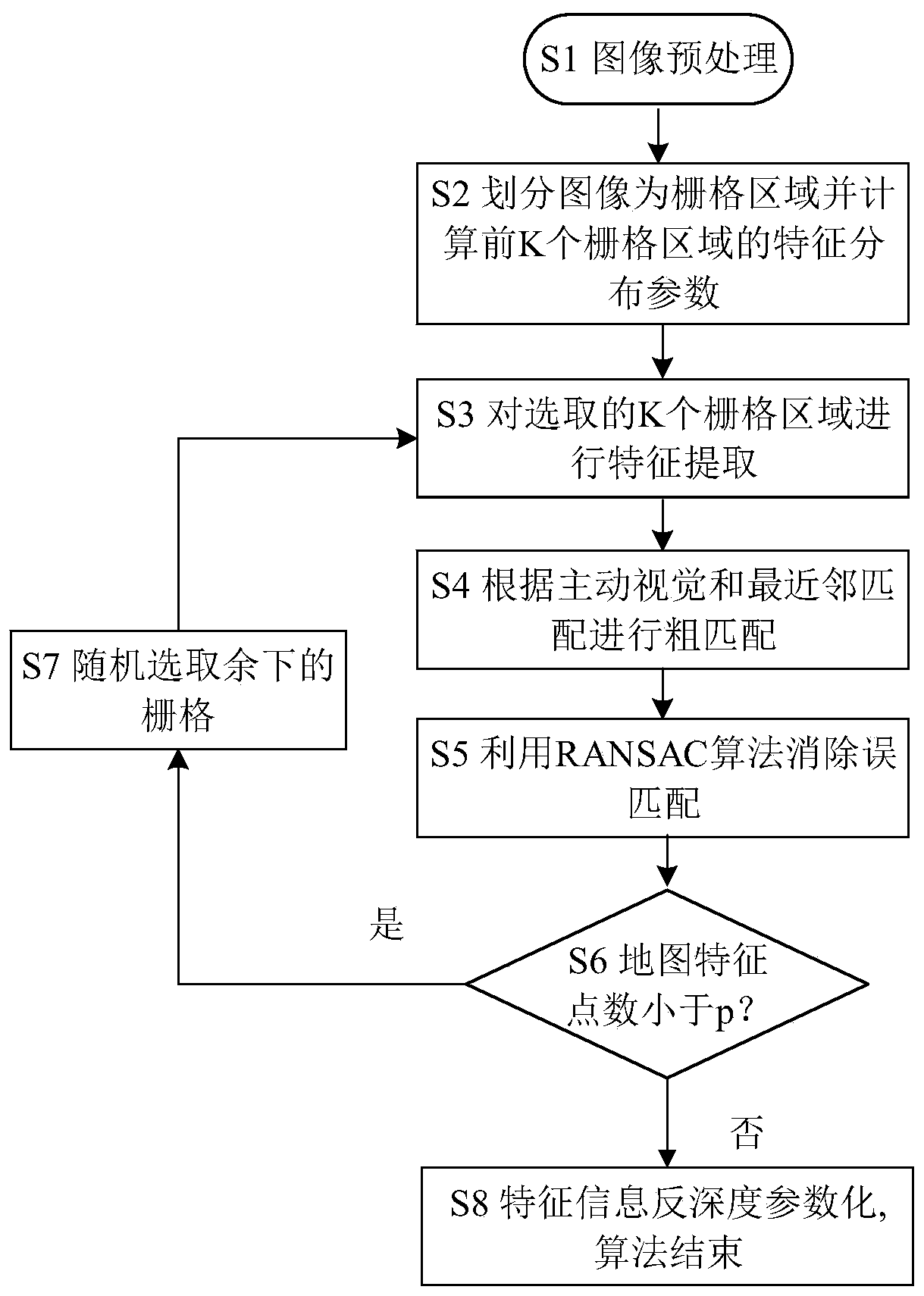
[0037] figure 1 It is a flow chart of the visual image feature extraction and matching method based on ORB and active vision in the present invention.
[0038] In this embodiment, the experimental images are image sequences of the surface of cardiac soft tissue collected by a monocular endoscope. The image sequence resolution is 320×240, and 30 frames of images are taken per second. The internal parameters of the endoscope are: f u =530.9003,f v =581.00362,u 0 =136.63037,v 0 =161.32884,k 1 =-0.2865,k 2 = 0.29524. The hardware and software environment used in the experiment is: Intel(R) Core(TM) i5-2450M@2.5GHz, memory 4G, Windows 7 system, and implemented in MATLAB 2012a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More