

Control method of semiflexible mechanical arm system
A control method and technology of manipulators, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as complex modeling and control process and failure to meet actual needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
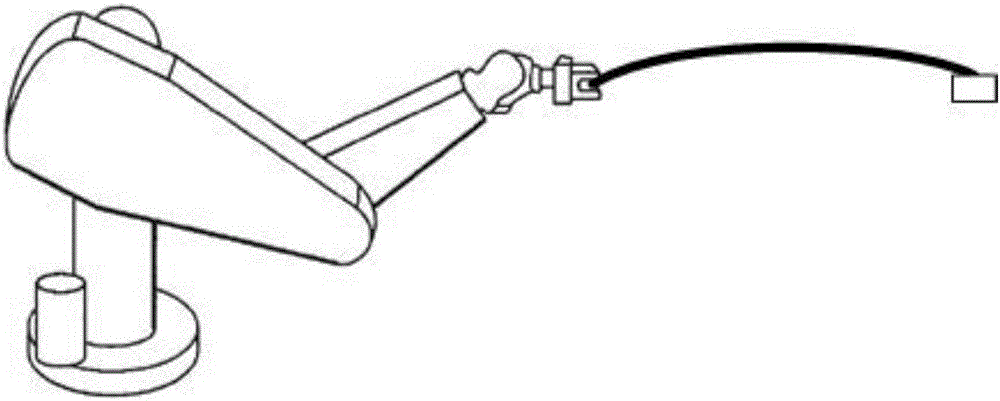
[0050] figure 1 It is a system diagram of a semi-flexible robotic arm composed of a rigid robotic arm and a flexible link, representing a general structure.
[0051] The kinematics and dynamics modeling method of a semi-flexible mechanical arm provided by the present invention, the specific implementation steps are as follows:
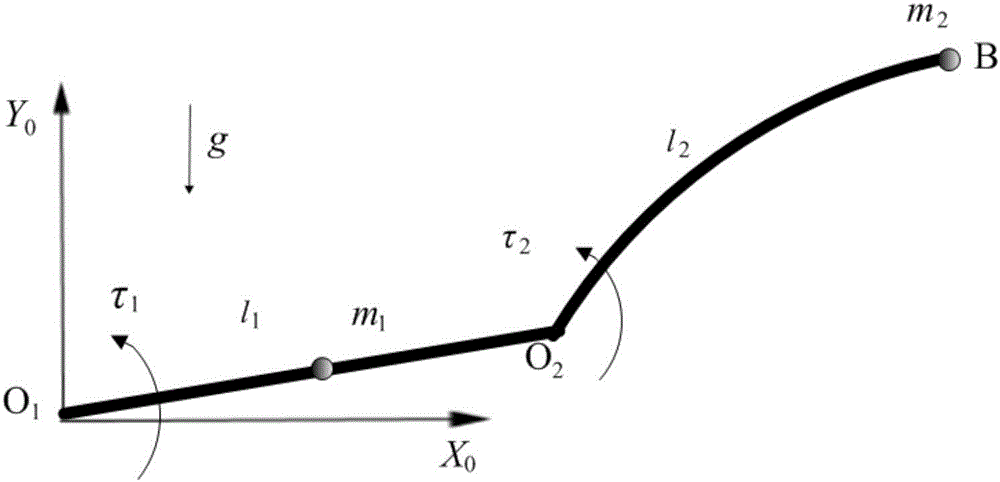
[0052] Step 1. The regulations of connecting rod and joint number. Such as figure 2 As shown, the 2-DOF semi-flexible manipulator has two rigid links, O 0 The base is defined as the No. 0 connecting rod ( figure 2 Omitted), O 1 To O 2 Connection Is the No. 1 rigid link, O 1 Represents the first joint, O 2 Represents the second joint, It is the No. 2 link, which is flexible. such figure 2 The semi-flexible robotic arm system shown has 2 degrees of freedom.
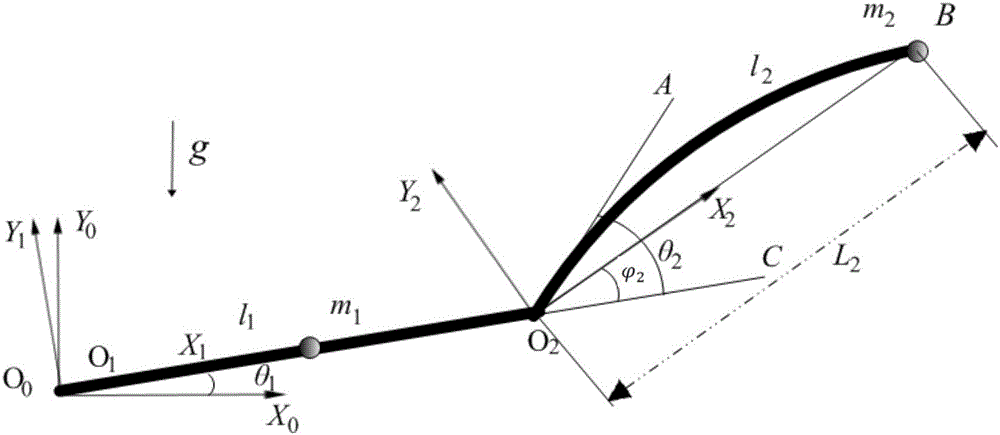
[0053] Step 2. Provision of additional coordinate system for connecting rod. In order to establish a kinematic model, it is necessary to specify the additional coordinate system of the linkage of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More