

Control system and control method for carrying automated guided vehicle
An automatic guidance and control system technology, applied in the control/regulation system, motor vehicles, transportation and packaging, etc., can solve the problem that the trajectory selection and traffic control are difficult to achieve effectively, and achieve low error rate, high efficiency, and increased efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
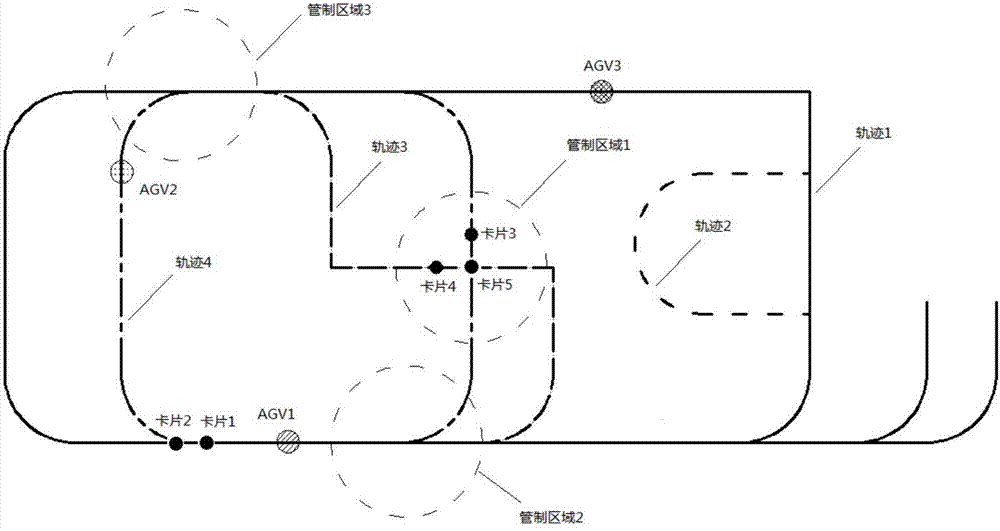
[0039] Aiming at the AGV control system in the prior art and the corresponding control method, this solution provides a control system for handling automatic guided transport vehicles, including tracks, automatic guided transport vehicles and control systems. The track is provided with Positioning card, a number of branch tracks are set in the track to form different trajectory modes, the control system automatically guides the transport vehicle through wireless connection, and obtains the position of the automatic guided transport vehicle through the positioning card. This solution can provide several kinds of orbits for AGV to work, set different orbits for different requirements, and set different trajectory modes. The console includes screens that display real-time AGV and track status, as well as manual buttons. It is convenient to monitor and control the AGV.
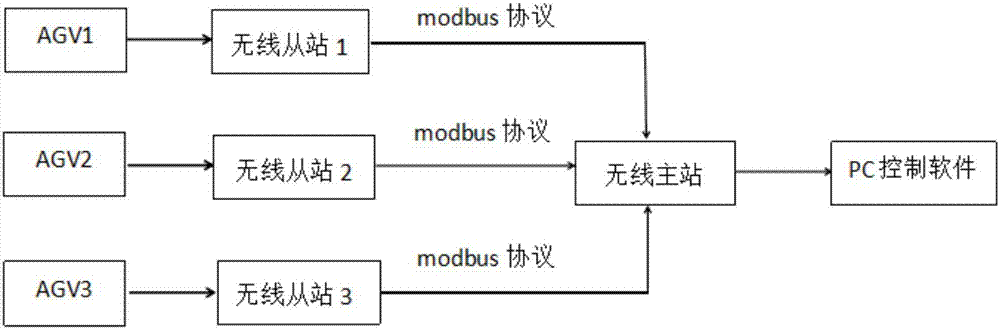
[0040] The control system includes a PLC system, wherein real-time wireless data exchange is performed through...
Embodiment 2
[0046] The control method of the automatic guided transport vehicle control system, the steps are as follows:
[0047] A. Several automatic guided transport vehicles are connected to the control system through the wireless system, and different equipment numbers are set for different automatic guided transport vehicles and control systems;
[0048] B. The automatic guided transport vehicle moves through the track and its own control program, and the control system monitors and controls different automatic guided transport vehicles through different equipment numbers;
[0049] C, and locate the position through the positioning card, and select the corresponding track to run;
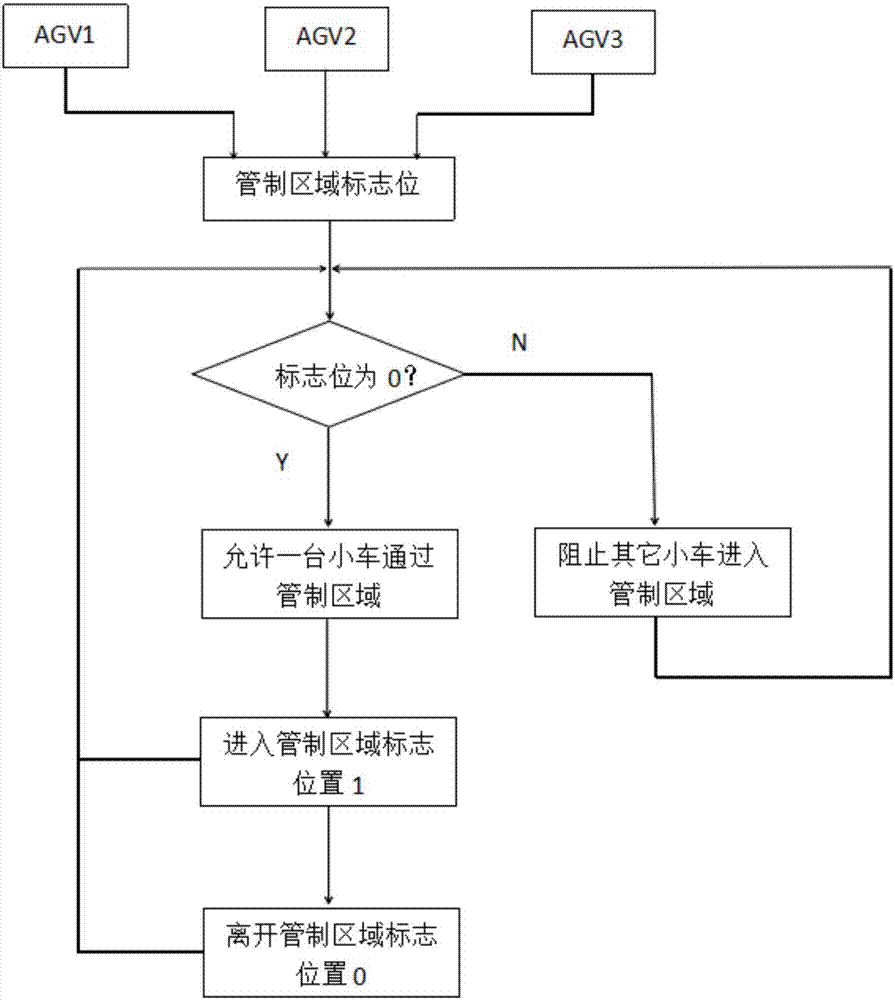
[0050] D. When multiple automatic guided transport vehicles are running, other cars are prohibited from entering the track of the existing automatic guided transport vehicles or the required cars are allowed to enter according to the needs. According to the needs, some tracks are set so that multiple cars...
Embodiment 3
[0053] For the realization of the track selection of a single AGV, the method of card positioning is adopted now, and two positioning cards need to be placed, among which the positioning card 2 is located at the intersection of the tracks that need to be changed, and the positioning card 1 is located 10cm in front of the positioning card 2. After passing through positioning card 1 and positioning card 2 in turn, the input flag position 1 of the role of positioning card 1, three conditions are connected in series in the PLC ladder diagram, which are respectively the flag position of positioning card 1, the track change flag position of the host computer, and Positioning card 2 corresponds to 8 io bits. If the three conditions are met, the subroutine can be entered for lane change operation, the car will change lanes by itself and exit the subroutine, and the upper computer will issue a command to change the lane flag position 1, and then enter the lane change execution.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More