

Polishing robot used for internal surface of iron pan
A technology of inner surface polishing and robotics, which is applied in the direction of surface polishing machine tools, grinding/polishing equipment, grinding racks, etc., can solve the problems of unguaranteed polishing quality, low manual accuracy, and affecting the production of iron pans, etc. Achieve the effect of saving manpower and material resources, convenient angle adjustment and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with accompanying drawing and specific embodiment, and present embodiment is based on the premise of technical scheme of the present invention, has provided detailed implementation and specific operation process, but protection scope of the present invention is not limited to following implementation example.
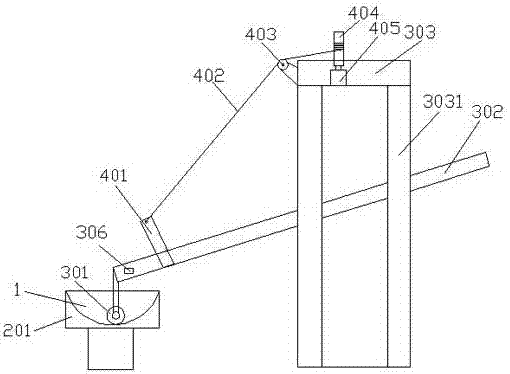
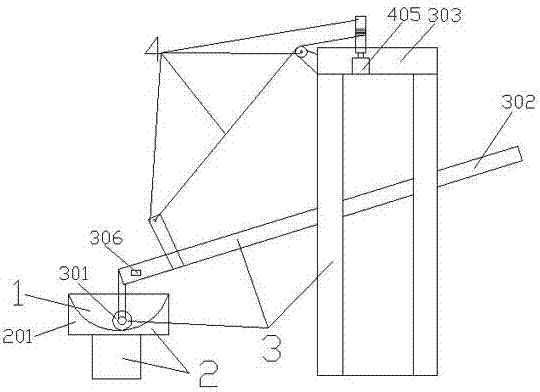
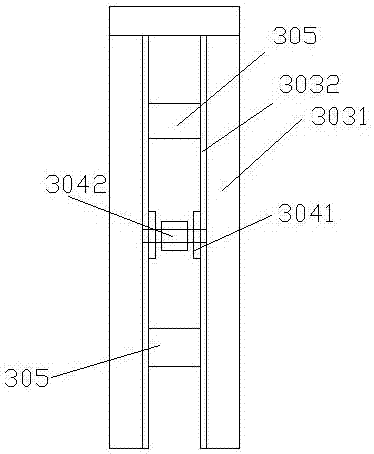
[0018] As shown in the figure, the present invention is a polishing robot for the inner surface of an iron pan, including a rotary table 2 that drives the rotation of the pan to be polished 1, a polishing mechanism 3 for polishing the pan to be polished 1, and an adjustment mechanism for adjusting the direction of the polishing mechanism 3 4 and a control system for controlling the operation of the polishing robot, the polishing mechanism 3 includes a grinding wheel 301 controlled by the motor 1, a swing rod 302 driving the movement of the grinding wheel 301, and a support frame 303 slidingly c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More