

Unit module of telescopic soft body robot
A unit module and robot technology, applied in the field of robotics, can solve the problems of small load of soft robots and weak execution force of a single module, and achieve the effects of simple structure, increased linear displacement, and increased working space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the following embodiments in no way limit the present invention.
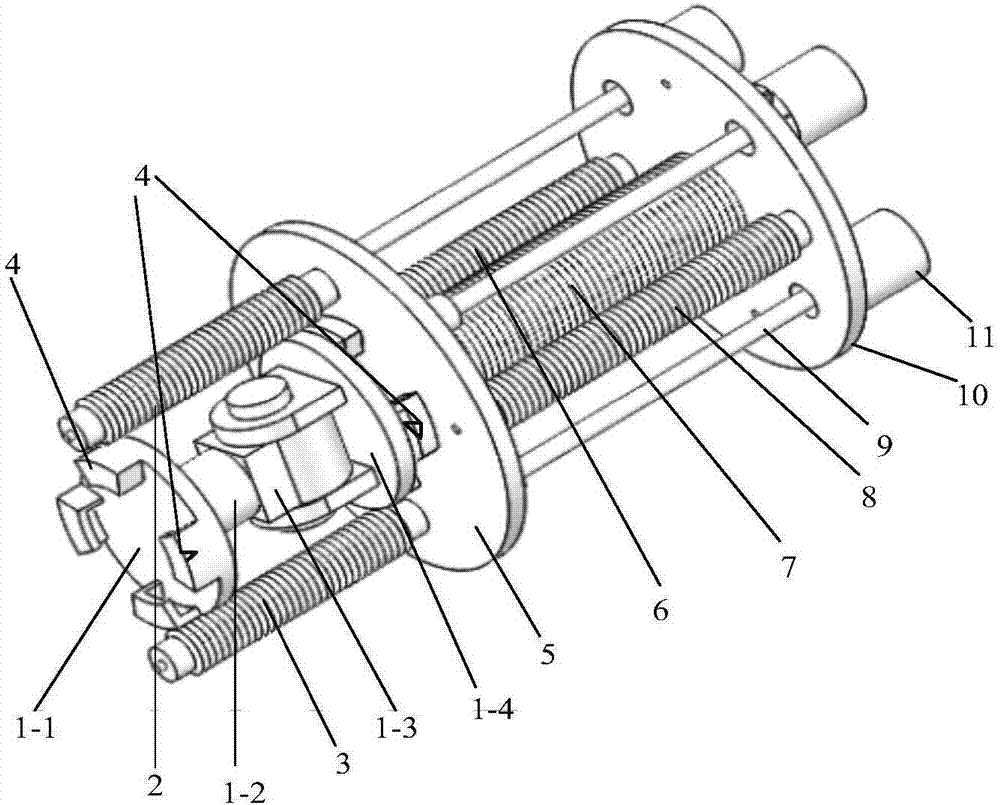
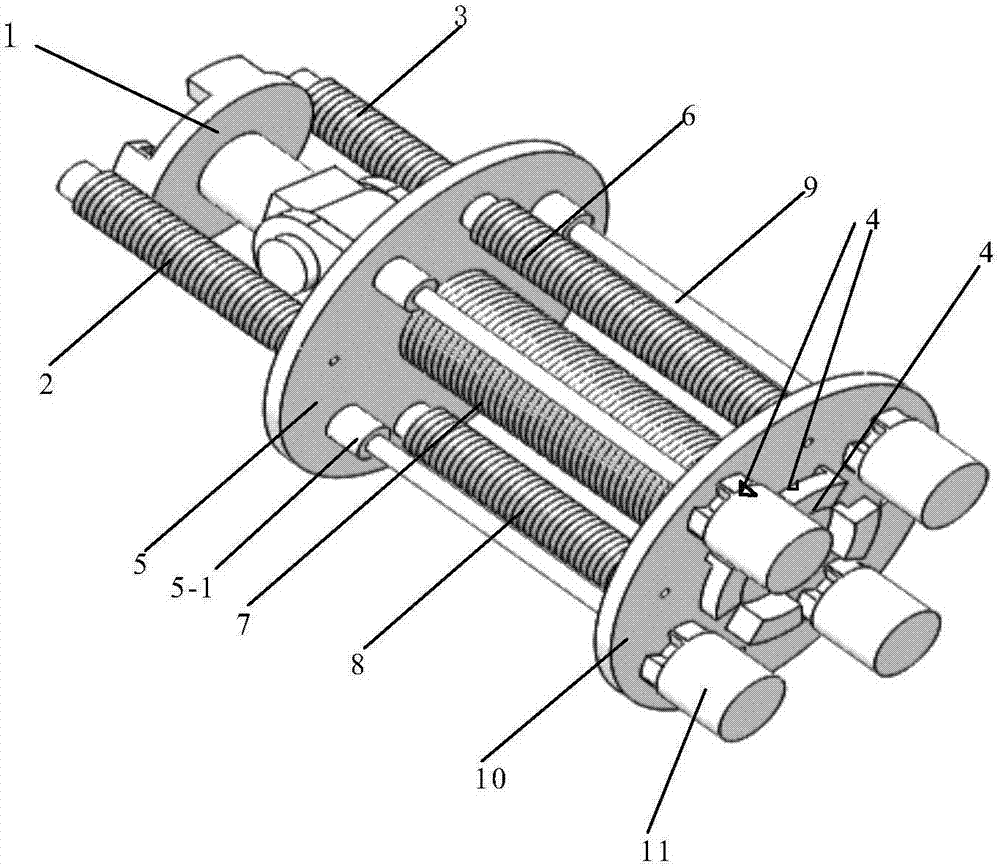
[0026] Such as Figure 1~2 As shown, the scalable soft robot unit module is a cylindrical structure with a bottom diameter of 30cm and a height of 42cm from the overall appearance;
[0027] Specifically, the scalable soft robot unit module includes a steering drive mechanism, a wrist joint movement mechanism, a drive cable assembly and a communication cable assembly;
[0028] The steering drive mechanism includes a steering drive front panel 5, a telescopic pneumatic tube 7, a steering drive rear panel 10, four drive ropes 9 and four DC motors 11; wherein,
[0029] The two ends of the telescopic pneumatic tube 7 are bonded and fixed respectively at the center of the bottom surface of the steering drive front panel 5 and at the center of the top surface of the steering drive r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More