

Real time perception obstacle evading system and method for unmanned hydrographical survey ship obstacles
An obstacle and surveying ship technology, which is applied in the field of real-time obstacle avoidance system for unmanned channel surveying ships, can solve the problems of large manpower and material resources, personal safety, low work efficiency, etc., achieve safe and smooth work, reduce use costs, improve The effect of safety factor and work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
[0031] The invention provides a real-time obstacle avoidance system for an unmanned waterway surveying ship, which includes:
[0032] The ship positioning unit is used for real-time positioning of the ship and obtaining the real-time coordinates of the ship. In this embodiment, GPS and inertial navigation system are used.
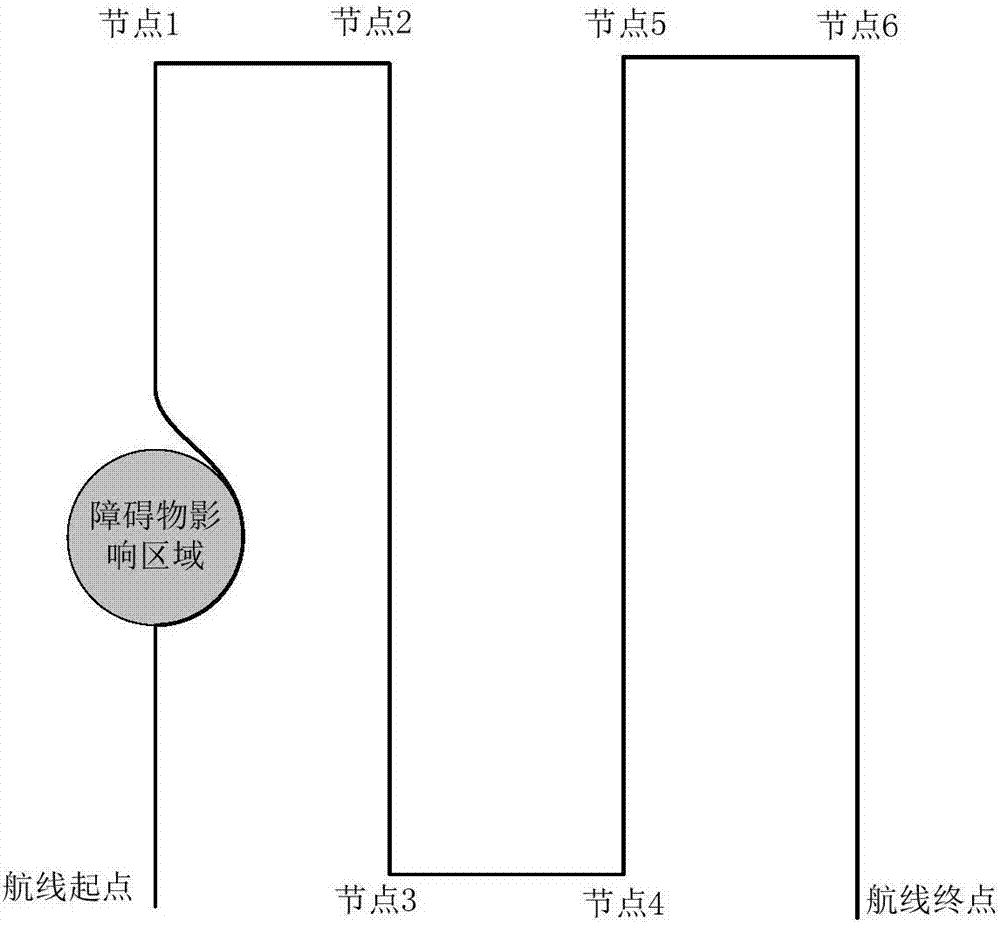
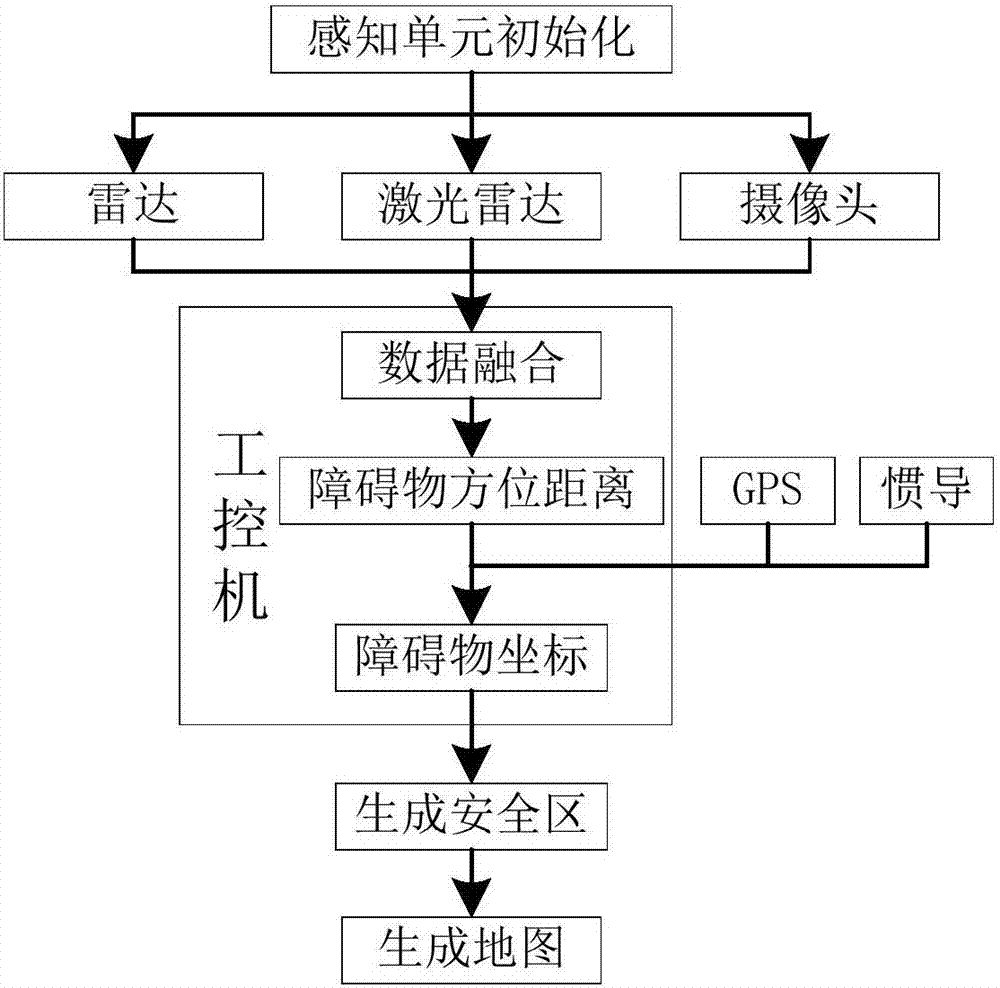
[0033] Environmental awareness units such as figure 2 As shown, it is used to sense obstacle information within a certain range by using at least two kinds of environmental perception sensors, data fusion of obstacle information detected by each environmental perception sensor, target matching and superimposition for detection overlapping areas, and combined with ship real-time Coordinates, generate an obstacle map, center on the detected obstacle position, set a circular area with a certain radius as the obstacle-affected area ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More