

Under-actuation exoskeleton recovery mechanical hand
A technology of manipulators and exoskeletons, applied in the field of rehabilitation robots, which can solve the problems of impact and vibration transmission system user injury, increase the complexity of the control system, and difficulty in meeting the needs of patients, so as to increase the replaceability and adjustability, and improve the scope of application , the effect of convenient assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
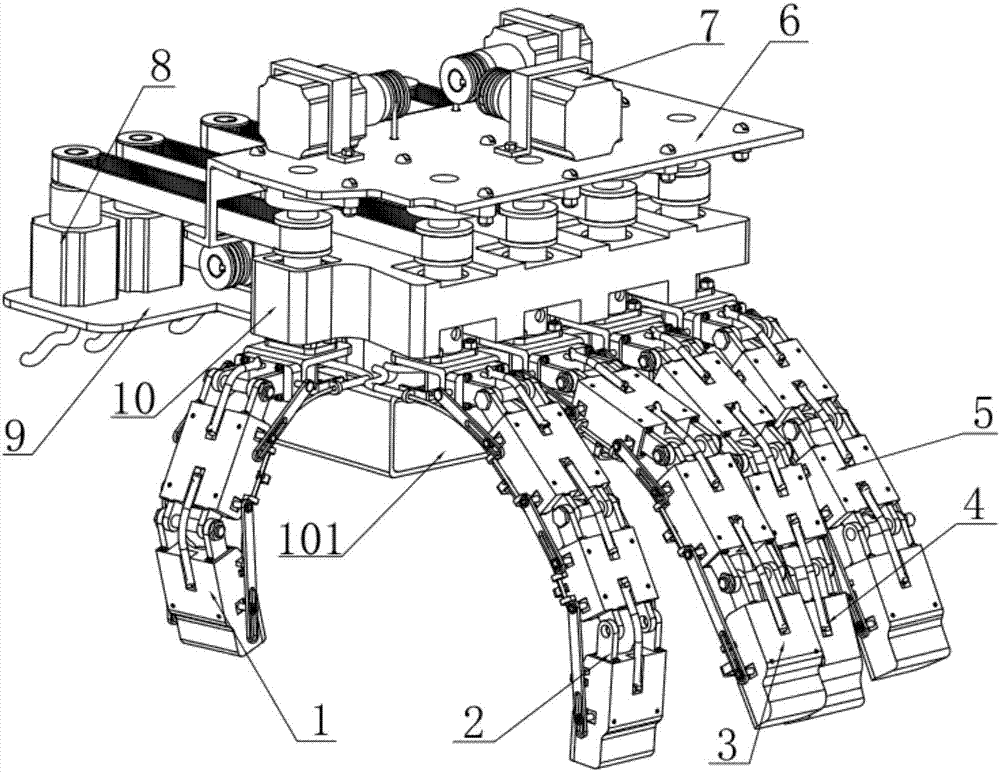
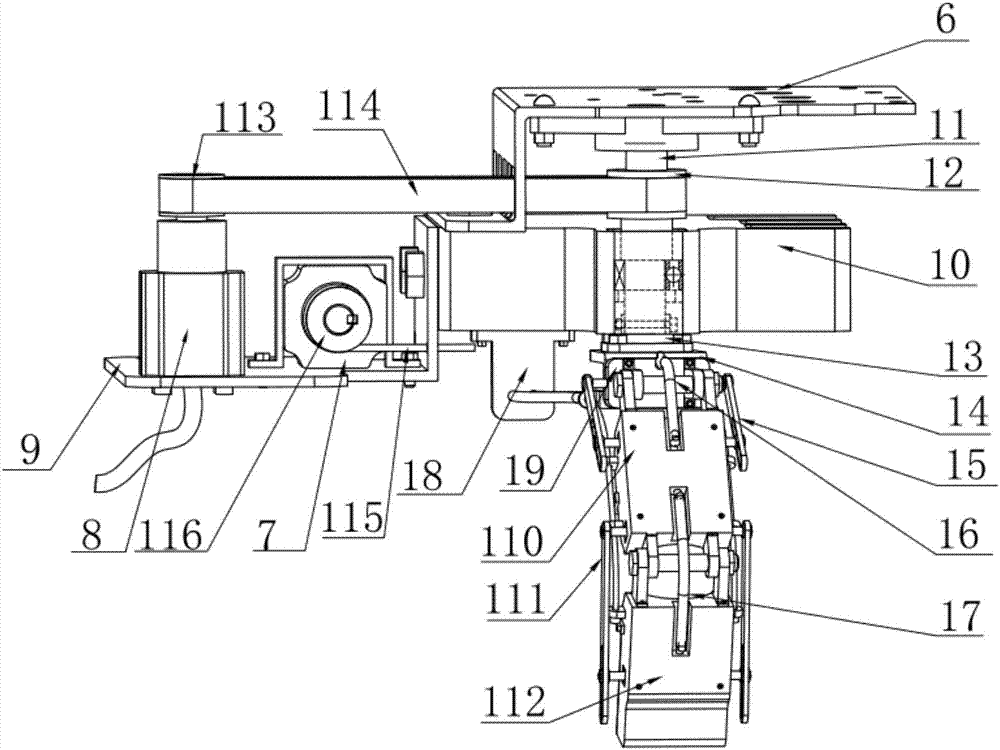
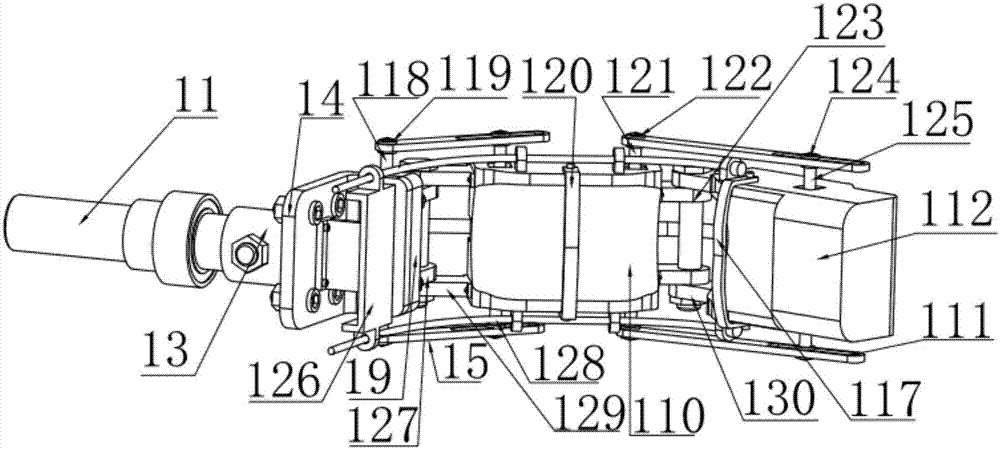
[0021] The present invention provides an underactuated exoskeleton rehabilitation manipulator (see Figure 1-5 , referred to as rehabilitation manipulator), including thumb joint assembly 1, index finger joint assembly 2, middle finger joint assembly 3, ring finger joint assembly 4, little finger joint assembly 5, motor first auxiliary support plate 6, finger flexion and extension drive motor group 7, finger swing Drive motor group 8, motor second auxiliary support plate 9, palm assembly 10 and palm fixer 101; described thumb joint assembly 1, index finger joint assembly 2, middle finger joint assembly 3, ring finger joint assembly 4 and little finger joint assembly 5 Connected with the palm assembly 10; the finger flexion and extension dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More