

Compound driven shoulder joint
A shoulder joint and driver technology, applied in the field of compound drive shoulder joints, can solve the problems of cumbersome operation, insufficient precision, and high precision of heavy load of the robot arm, and achieve the effect of flexible work and easy realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
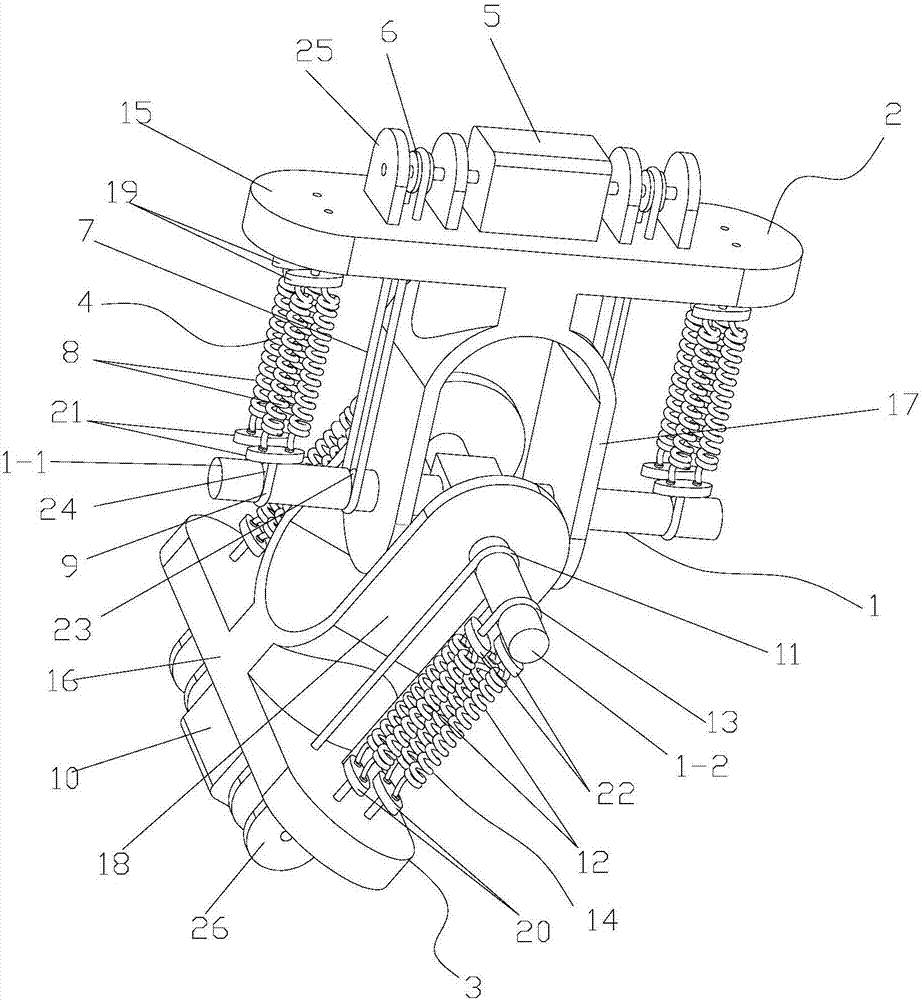
[0018] figure 1 It is a schematic diagram of the overall structure of the present invention, as shown in the figure: the composite drive shoulder joint of this embodiment includes a cross shaft 1, a movable hinge frame 2 and a fixed hinge frame 3, and is respectively used to drive the swing motion and pitch of the movable hinge frame 2 The swing drive part and the pitch drive part of the movement; the movable hinge frame 2 rotates with the first shaft body 1-1 of the cross shaft 1, and the second shaft body 1-2 of the cross shaft 1 rotates with the fixed hinge frame 3; as shown in the figure As shown, the cross shaft 1 is composed of the first shaft body 1-1 and the second shaft body 1-2 connected in a cross shape. The movable hinge frame 2, the fixed hinge frame 3 and the cross shaft 1 together form a Hooke hinge structure. , the fixed hinge frame 3 is fixed, and the movable hinge frame 2 is fixed with the big arm of the robot. The movable hinge frame 2 can produce rotation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More