

Path planning method for vertical automatic parking and system
A path planning, automatic parking technology, applied in data processing application, prediction, calculation, etc., can solve the problem of inability to complete parking, and achieve the effect of rapid path planning, good robustness, and simple logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
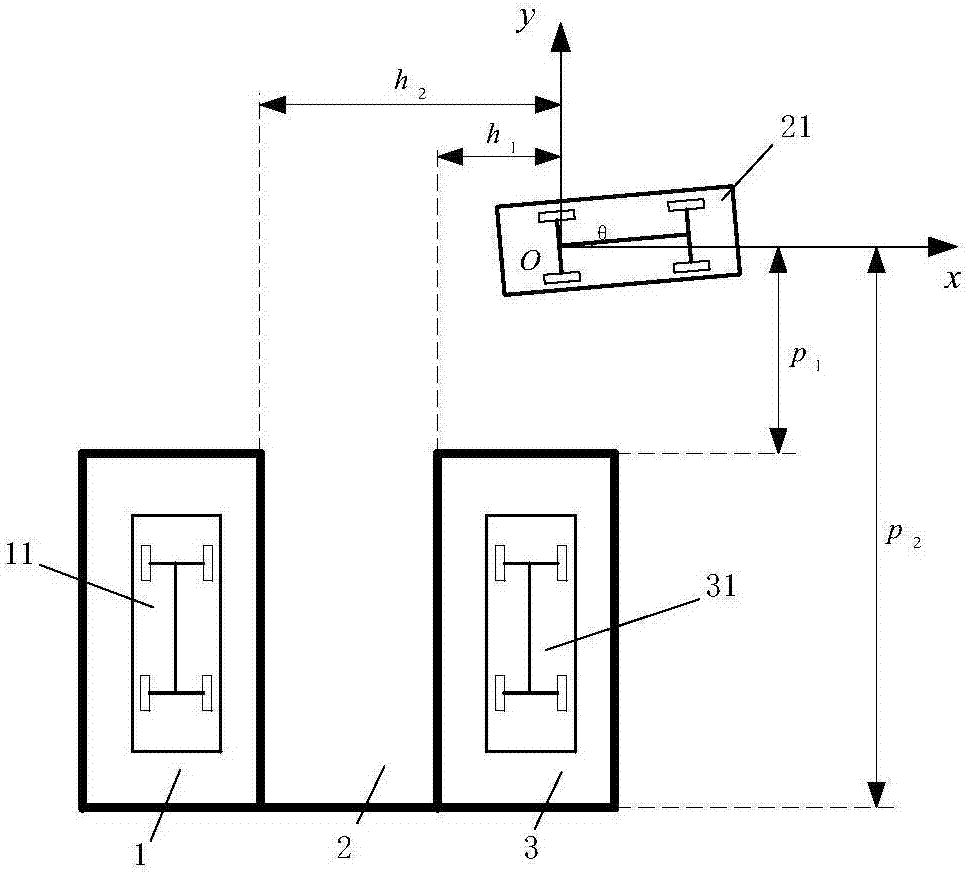
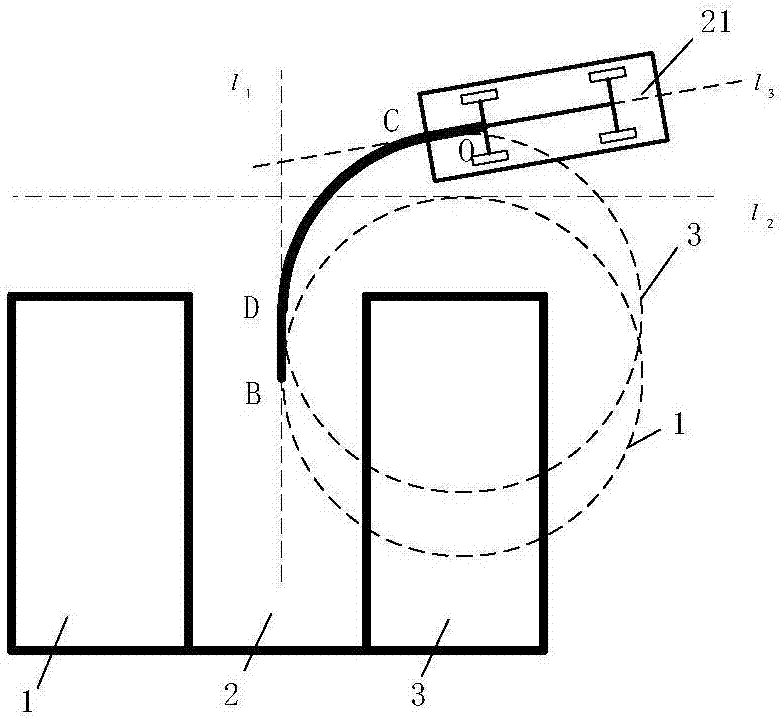
[0040] Such as image 3 As shown, the vehicle to be parked is at any position in area I, and the center point o of the rear axle of the vehicle to be parked is taken as the origin, and the origin o: (0,0,θ) establishes a global coordinate system, and θ is the heading angle of the vehicle. Determine whether the vehicle can be parked in the garage at one time in area I, and draw the extension line l along the drive shaft of the vehicle to be parked 3 , the center point o of the rear axle is located at l 3 On, along the central axis l of the No. 2 garage 1 Translate circle 1 upwards for tangent to get circle 3, circle 3 and l 3 tangent to point circle 3 and l 1 tangent to point Point C is located on the left plane of the coordinate origin o. The specific parking path is to connect points o, C, D, and B in sequence. The vehicle can be parked into the No. 2 garage at one time. There are 3 segments, the first segment is the connecting line segment between point o and point C...
Embodiment 2
[0042] Such as Figure 4 As shown, it is the same as Embodiment 1, except that the tangent point C is located on the right plane of the coordinate origin o, then the vehicle must be parked in the garage twice, and the vehicle to be parked needs to move forward to point C, and then follow the path of Embodiment 1 Carry out parking. Midpoint point The specific parking route is to connect points o, C, D and B in sequence. The vertical parking path of this embodiment is divided into three sections, the first section is the connecting line segment between point o and point C, the second section is the arc section between point C and point D, and the third section is the point D and point C The straight line segment of B.
Embodiment 3
[0044] If the vehicle is in Zone IV, three gear changes are required to complete parking. Such as Figure 5 As shown, the initial position of the vehicle to be parked is in area IV, and the global coordinate system is established with the center point o of the rear axle of the vehicle to be parked as the origin. The origin o is in area IV, and the straight line l where the drive shaft of the vehicle to be parked is drawn 4 , the origin o is on the line l 4 above, draw a circle 4 with the minimum turning radius of the vehicle to be parked as the radius, and the circle 4 is respectively connected with l 4 and l 1 tangent to the point and The parking path is to connect o, E, F and B in sequence. At this time, three shifts are required to park the vehicle to be parked in the No. 2 garage. The specific parking path in this embodiment is three sections. The first section is a straight line connecting point o and point E, and the second section is point The arc segment connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More