

High Dynamic Bias Online Estimation Method Based on Cross-Fuzzy Interval Judgment under Uniform Fuzzy Conditions of Range Measurement and Velocity Measurement
A fuzzy interval and fuzzy condition technology, applied in the field of radar signal and data processing, can solve the problems that the radar cannot lock the specific position information of the target, cannot obtain the effective speed information of the target, and cannot effectively identify the return time, so as to achieve high dynamic deviation compensation Processing, real-time detection, good detection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The online estimation method of high dynamic deviation under the condition of ambiguity in range measurement and speed measurement will be described below with reference to the accompanying drawings.
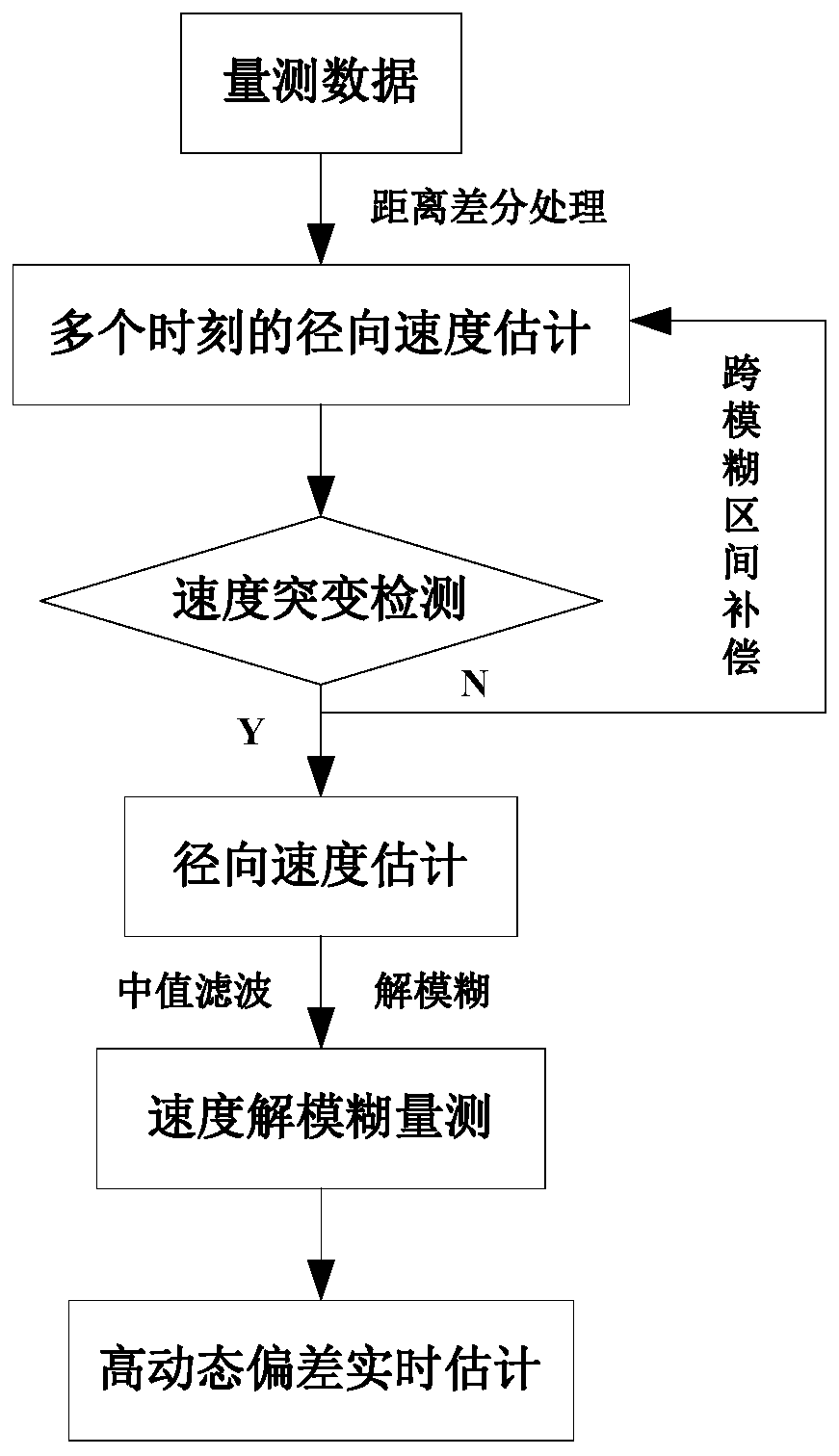
[0044] Implementation conditions: Assume that the initial position of the hypersonic target in the near space is [300km, 300km, 20km], the flight speed is 5000m / s, and the flight direction is 30°northwest. Correspondingly, the position of the observation radar is [0km, 0km, 0km], the radar wavelength is λ=0.15m, the chirp signal width is τ=600μs, the chirp bandwidth is B=1.5MHz, the radar distance, azimuth and pitch The measurement errors are 100m, 0.1° and 0.1° respectively, and the observation period is 1s. Refer to attached figure 1 , the specific implementation steps are as follows:
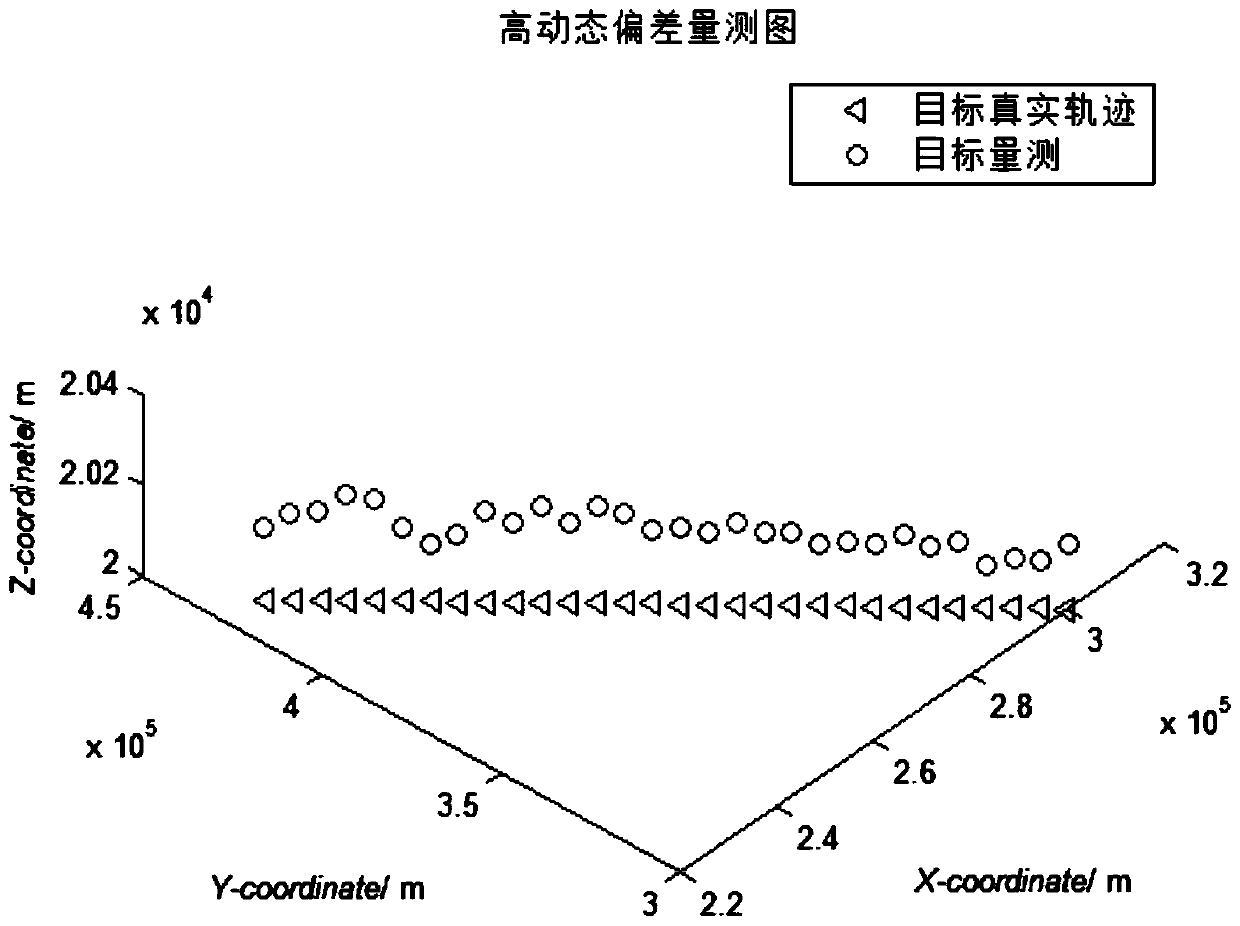
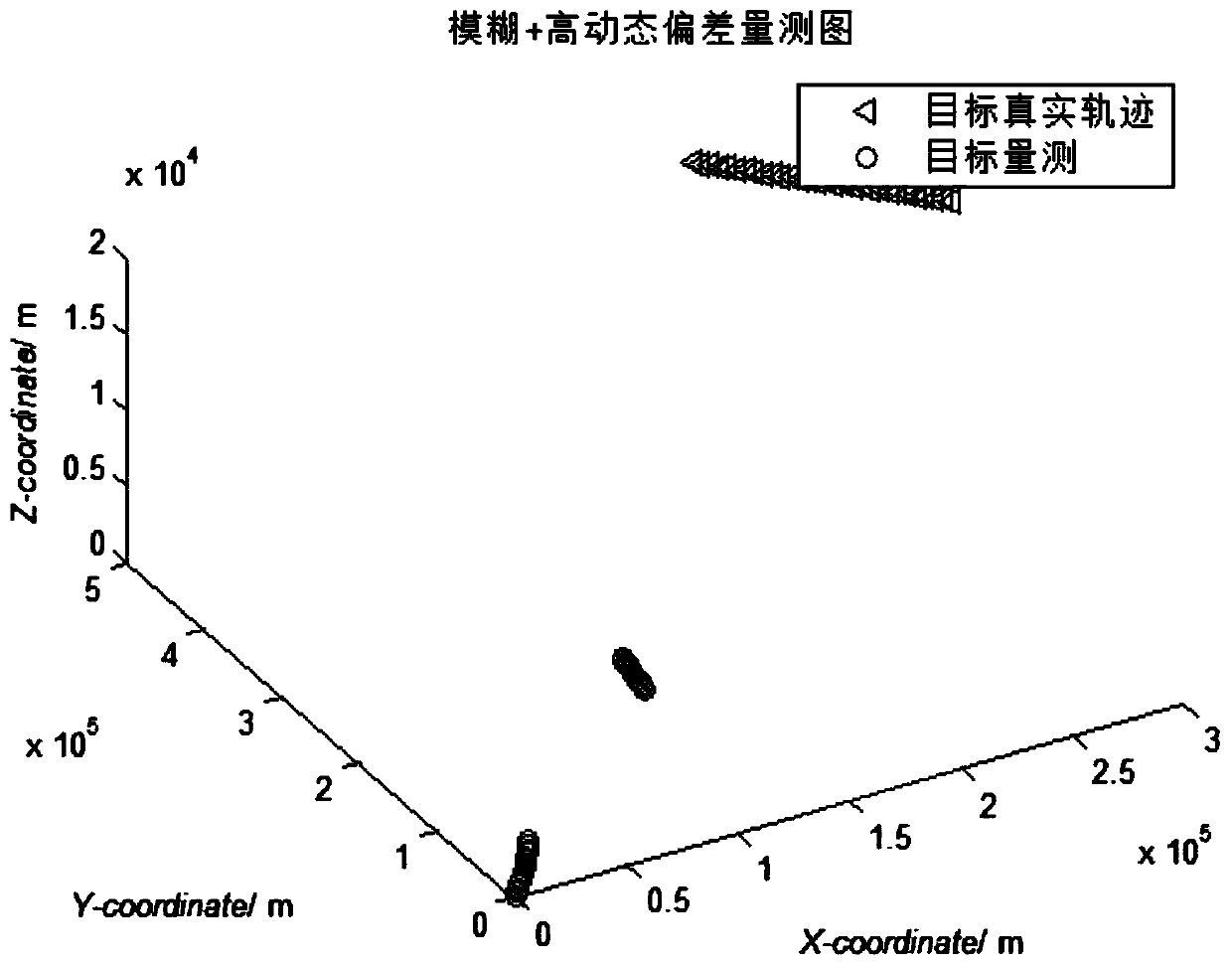
[0045] (1) The radar uses the LFM signal to detect the target and obtains 30 frames of measurement data, among which the impact of high dynamic deviation + measurement blur on target m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More