

Five-finger humanoid manipulator based on 3D printing
A technology of 3D printing and manipulators, applied in the field of bionic manipulators, can solve the problems of hard contact of grasping objects and difficulty in controlling the grasping force, and achieve the effects of high production efficiency, convenient production and cost saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
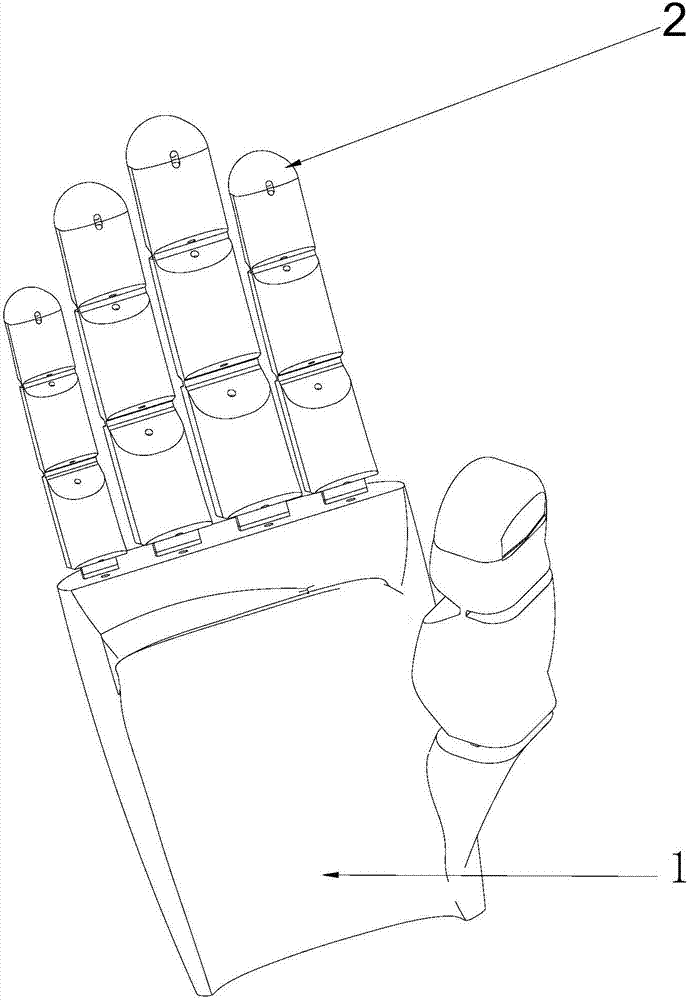
[0026] Such as figure 1 As shown, Embodiment 1 of the present invention provides an integrated five-finger humanoid manipulator based on 3D printing. This manipulator not only has the basic functions of a traditional five-finger humanoid manipulator, but also has the advantages of being easy to manufacture, easy to control, and has a preliminary sense of touch. . It includes a hand body with 14 bending degrees of freedom and a rope-drawing component and a touch sensing component arranged on the hand body. The rope-drawing component can realize the movement of the finger 2, making the manipulator safe and flexible, and the contact The sensory component can feed back signals in real time to judge whether the finger 2 is in contact with the object, so as to ensure the object is held firmly; The main body includes a palm 1 and five fingers 2 connected to the palm 1. The five fingers 2 are all made by imitating human hands. The fingers 2 and the palm 1 are connected by an integrat...
Embodiment 2
[0029] Embodiment 2 of the present invention further defines the structure of the manipulator on the basis of Embodiment 1. The main body of the hand with 14 bending degrees of freedom is an integrally formed structure made of flexible materials by 3D printing equipment. The 3D printing device can be a 3D printer. The manipulator made by 3D printing technology does not need the subsequent connection and assembly process. It can not only realize the bionic movement of the human hand, but also realize the bionic movement of the human hand by using flexible materials. In addition, in During the manufacturing process, the process of connecting and assembling is omitted, the manufacturing cost is reduced, the production efficiency is improved, and the manufacturing cost is reduced.
[0030] It should be further noted that the flexible material is a resin material, and the tensile strength and flexural modulus of the resin material are both 35-45 MPa.
[0031] It should be further n...
Embodiment 3
[0036] Such as Figure 4 As shown, on the basis of Embodiment 1, Embodiment 3 of the present invention further defines that each finger 2 is composed of three knuckles 3, and the joints are connected by an integrated flexible belt structure, without the need for Relative bending and stretching motions can be realized through connections such as pin shafts. Adjacent knuckles 3 joints are located on the side of the finger pad and on the side of the back of the finger, and are oppositely provided with a notch 4, and the opening of the notch 4 on the side of the finger pad on the knuckle 3 The angle is greater than the opening angle of the notch 4 located on the side of the back of the finger on the knuckle 3 . The finger pads and the fingers are relatively provided with notches 4, which can realize bending between joints through the notches 4, effectively imitating human joints.
[0037] Such as Figure 5 As shown, it should be noted that the fingers 2 include thumb, index fin...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Flexural modulus | aaaaa | aaaaa |
| Flexural modulus | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More