

Combined navigation method and device for unmanned aerial vehicle based on expanded auto-adaptive interval Kalman
A combined navigation and unmanned aerial vehicle technology, applied in navigation, surveying devices, surveying and navigation, etc., can solve time-varying problems and achieve the effects of improved adaptability, small quality and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
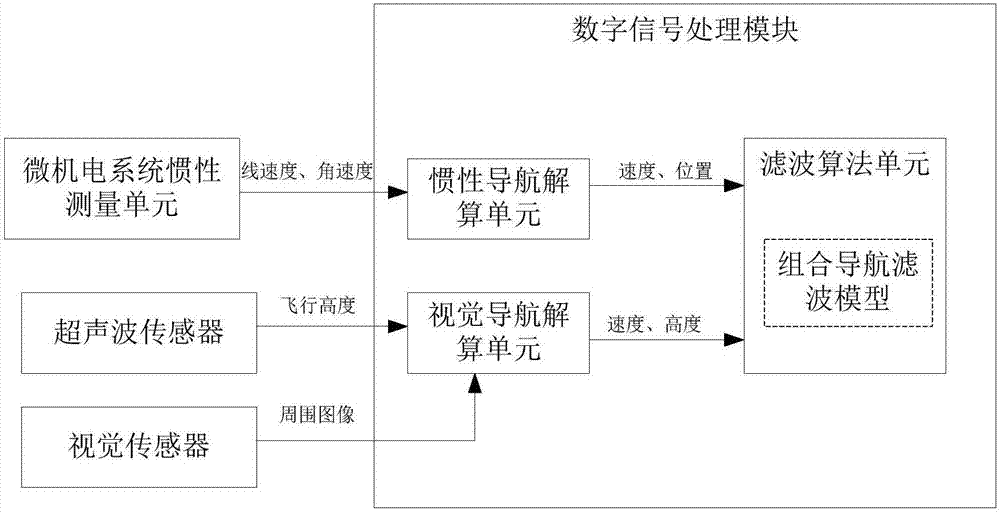
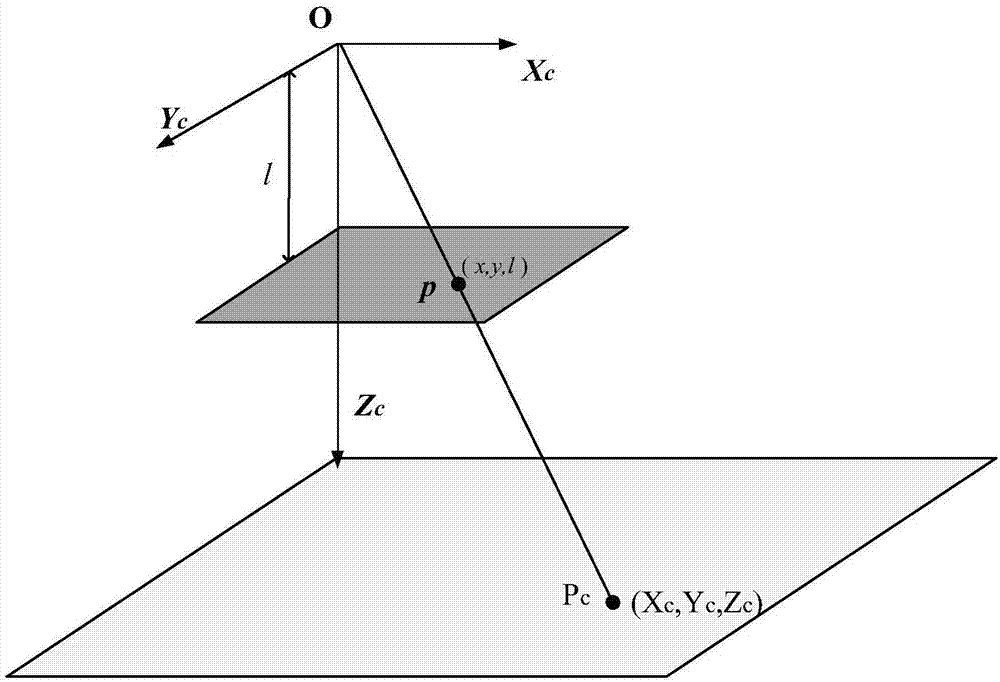
[0038] A UAV integrated navigation method based on extended adaptive interval Kalman disclosed in the embodiment of the present invention is as follows: Obtain the speed information and position information of the UAV in the navigation coordinate system through inertial navigation as the state information of the integrated navigation parameters ; Obtain the speed information and flight height information of the UAV in the horizontal direction under the navigation coordinate system through visual na...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More