

Unmanned vehicle self-positioning method based on three-dimensional laser radar
A technology of three-dimensional laser and unmanned vehicles, which is applied in the directions of electromagnetic wave re-radiation, radio wave measurement system, utilization of re-radiation, etc., can solve the problems of positioning algorithm failure, false detection, etc., achieve high positioning accuracy, remove abnormal points, map Match the exact effect
Inactive Publication Date: 2017-08-04
睿舆自动化(上海)有限公司
View PDF7 Cites 30 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0009] Although the positioning algorithm based on the feature level has the advantages of simple structure and low computational complexity, there are some limitations when it is applied to the positioning of unmanned vehicles and the estimation of the state of nonlinear systems in complex environments.
When an unmanned vehicle is driving in a complex environment, it is difficult to associate the feature points detected by the on-board sensors with the map data. The reason is that there will be false detections and obstacles in the detection of feature points. match, which will cause the positioning algorithm to fail
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0065] Specific steps are as follows:
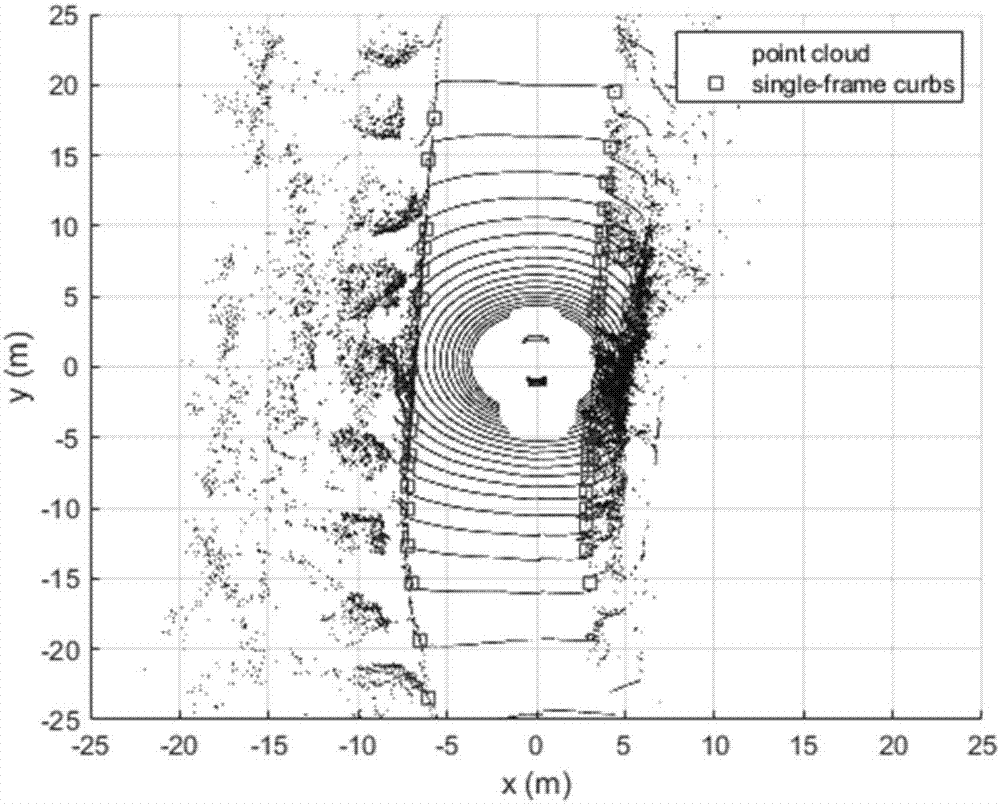
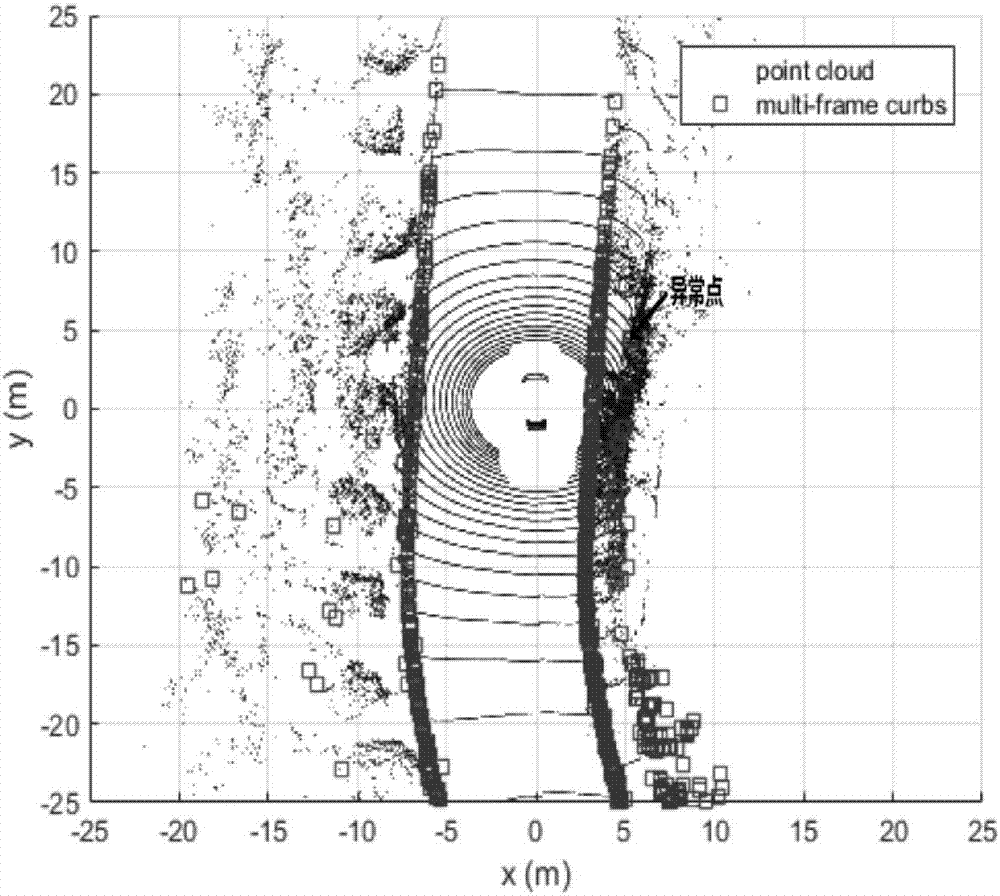
[0066] Step 1: Extract roadside feature points from single-frame laser point cloud data, and convert multi-frame detected roadside feature point coordinates to the current vehicle coordinate system according to the vehicle kinematics model.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention relates to an unmanned vehicle positioning algorithm based on a three-dimensional laser radar. The unmanned vehicle positioning algorithm includes the following steps: 1. extracting road edge feature points from a single frame of laser point cloud data, and according to a vehicle kinematic model, converting multiple frames of detected road edge feature point coordinates into a current vehicle coordinate system; 2. utilizing a Beam model method to extract the outlines of the multiple frames of road edge feature points; and 3. matching the road edge outline extracted in the Step 2 with high-precision map data, calculating lateral, longitudinal and course angle deviations of a current vehicle as observation values, and inputting the observation values into Kalman filters to perform vehicle pose estimation. Long-time long-distance stable positioning of the vehicle can be guaranteed. The method is applicable to various laser sensors, and can also obtain relatively high positioning accuracy. Abnormal points can be effectively removed, so that map matching is more accurate, and positioning accuracy is higher.
Description
technical field [0001] The invention relates to an autonomous positioning method for an unmanned vehicle. Background technique [0002] State of the Art and Its Defects [0003] With the development of computer technology and artificial intelligence, unmanned vehicles (hereinafter referred to as unmanned vehicles) have shown great application prospects in military, transportation, industrial production, logistics and warehousing, and daily life. In terms of national defense and military affairs, unmanned vehicles are mostly used to perform military tasks in dangerous scenarios, such as military rescue and material delivery. In terms of traffic safety, unmanned driving technology is an effective means to promote the development of intelligent transportation systems. Unmanned driving technology based on artificial intelligence can improve the active safety of vehicles, and can effectively reduce traffic accidents caused by driver misuse, thereby Improve traffic efficiency an...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01S17/88G01C21/16
CPCG01C21/165G01S17/88
Inventor王晓年
Owner睿舆自动化(上海)有限公司