

Mobile robot system
A technology of mobile robots and controllers, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high cost, small size, and bulky volume, and achieve the effects of saving costs, improving stability and control reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
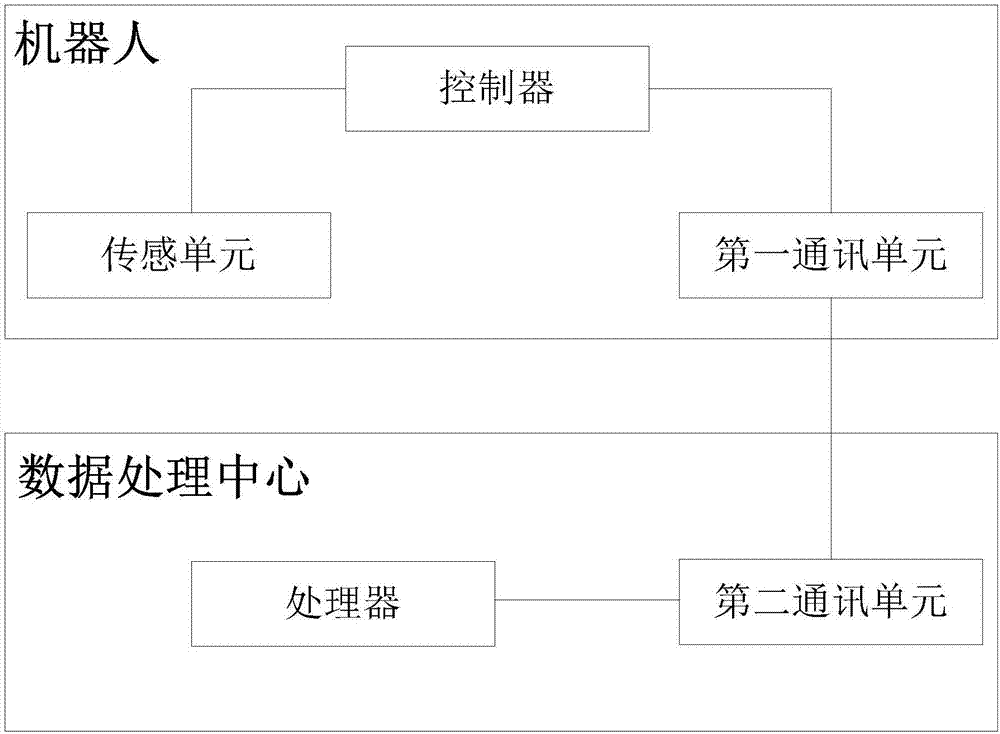
[0034] figure 1 It is a schematic diagram of the mobile robot system of Embodiment 1 of the present invention, such as figure 1 As shown, the mobile robot system of this embodiment includes a mobile robot and a data processing center;
[0035] The mobile robot includes a sensing unit, a controller and a first communication unit;
[0036] The data processing center includes a processor (for example, various data processing chips such as CPU, GPU, TPU) and a second communication unit;
[0037] The sensing unit is used to collect environmental data. For example, at least one of a visual sensor, an auditory sensor, a tactile sensor, an olfactory sensor, and a taste sensor is included. An attitude sensor and / or an acceleration of gravity sensor may also be included.
[0038] The controller is used for processing the environment data to output the environment information to the processor of the data processing center.
[0039] The processor is used to process environmental info...
Embodiment 2
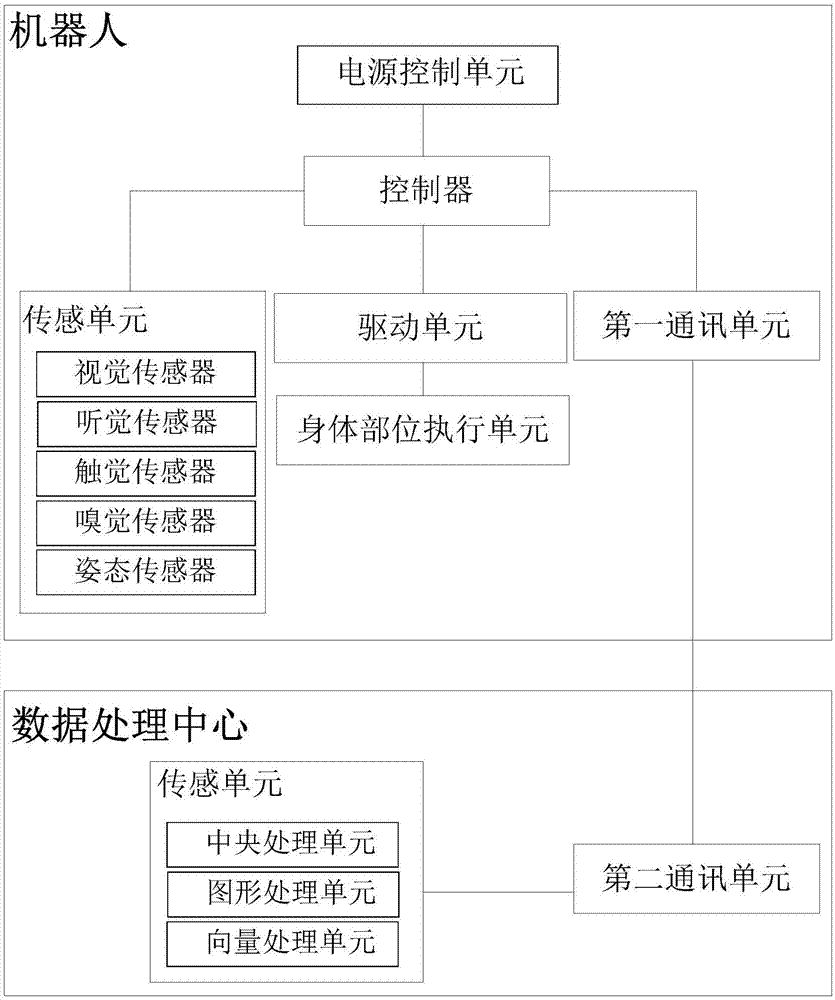
[0042] figure 2 It is a schematic diagram of the mobile robot system of Embodiment 1 of the present invention, such as figure 2 As shown, the mobile robot system of this embodiment includes a mobile robot and a data processing center;
[0043] The mobile robot includes a sensing unit, a controller, a drive unit, a body part execution unit, a power control unit and a first communication unit;
[0044] The data processing center includes a processor and a second communication unit; for example, the data processing center can be a PC or an industrial computer.
[0045]The sensing unit is used to collect environmental data, including visual sensors, auditory sensors, tactile sensors, olfactory sensors, taste sensors, attitude sensors and gravity acceleration sensors. For example, the vision sensor is the direct source of information for the entire robot vision system, mainly composed of one or two image sensors, sometimes accompanied by a light projector and other auxiliary eq...
Embodiment 3
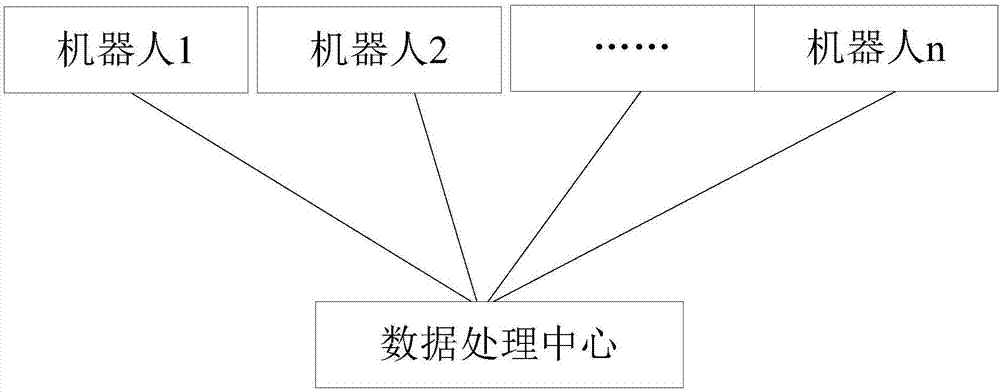
[0052] image 3 It is a schematic diagram of an interactive system between a data processing center and multiple mobile robots of the present invention.
[0053] When the wireless broadband is sufficient, a data processing center can provide data processing capabilities for multiple mobile robots, which can manage multiple mobile robots and greatly reduce the cost of multiple mobile robots working together.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More