Automatic puncture robot
A robotic and automatic technology, applied in the field of medical devices, can solve problems such as poor accuracy and errors, and achieve the effect of safety and reliability guarantee
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
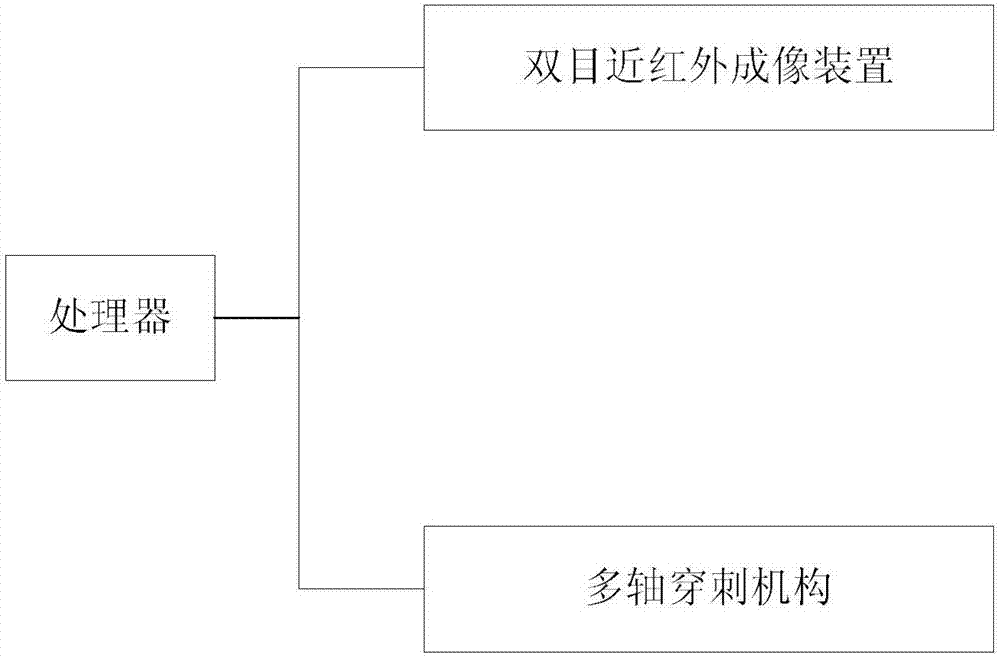
[0048] Please refer to figure 1 , figure 1 A structural schematic diagram of an automatic puncturing robot provided in an embodiment of the present invention, such as figure 1 , the automatic puncture robot includes: a processor, a binocular near-infrared imaging device and a multi-axis puncture mechanism; wherein,
[0049] Both the binocular near-infrared imaging device and the multi-axis puncture mechanism are electrically connected to the processor;
[0050] The processor receives and processes the blood vessel information sent by the binocular near-infrared imaging device, forms instruction information and sends it to the multi-axis puncture mechanism, so that the multi-axis puncture mechanism controls the puncture needle to perform puncture actions according to a predetermined trajectory.
[0051]In a specific implementation of this embodiment, the infrared processing module of the binocular near-infrared imaging device performs image enhancement processing and feature ...
Embodiment 2
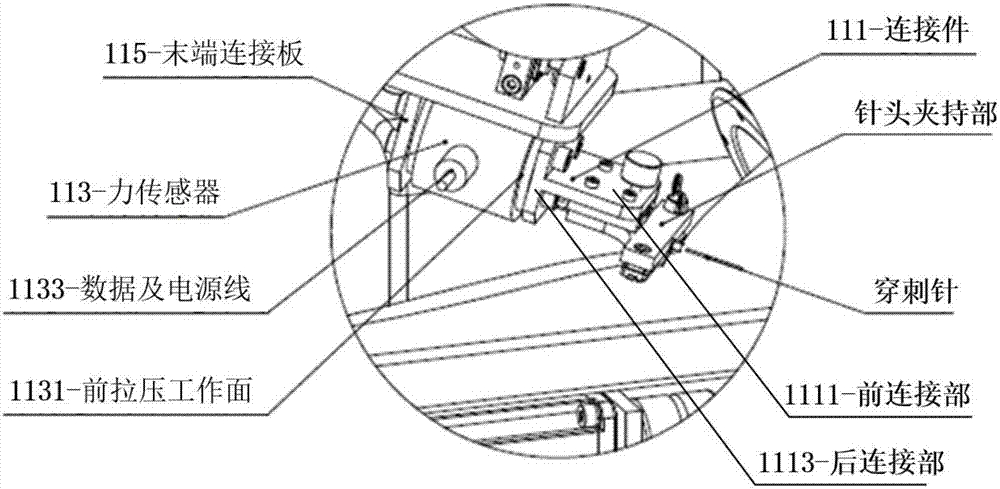
[0093] Please refer to Figure 12 , Figure 12 A structural schematic diagram of another automatic puncture robot provided for the embodiment of the present invention; please refer to Figure 13 , Figure 13 A partially enlarged schematic diagram of an automatic puncture robot in the arm part provided for the embodiment of the present invention; in this embodiment, a working process of the automatic puncture robot is as follows:
[0094] (1) First, the patient comes to the equipment, sits on the blood collection chair, adjusts the seat automatic / manual adjuster 41, moves the seat back and forth and height to a satisfactory position, releases the adjuster, and the seat automatically locks.
[0095] (2) The patient takes out the blood collection information registration card and places it on the device information card scanning system 419. After about 5 seconds, the information is automatically entered into the blood collection machine.
[0096] (3) Voice recognition / human-co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com