

Compliant force control method based on fuzzy reinforced learning for mechanical arm
A technology of reinforcement learning and control methods, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of ensuring smooth and smooth human-computer interaction operations, difficulty in taking into account control accuracy and operating experience, and inapplicable robot active positioning requirements and other issues, to achieve the effect of smooth and natural human-computer interaction experience, good adaptive ability, and improved positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
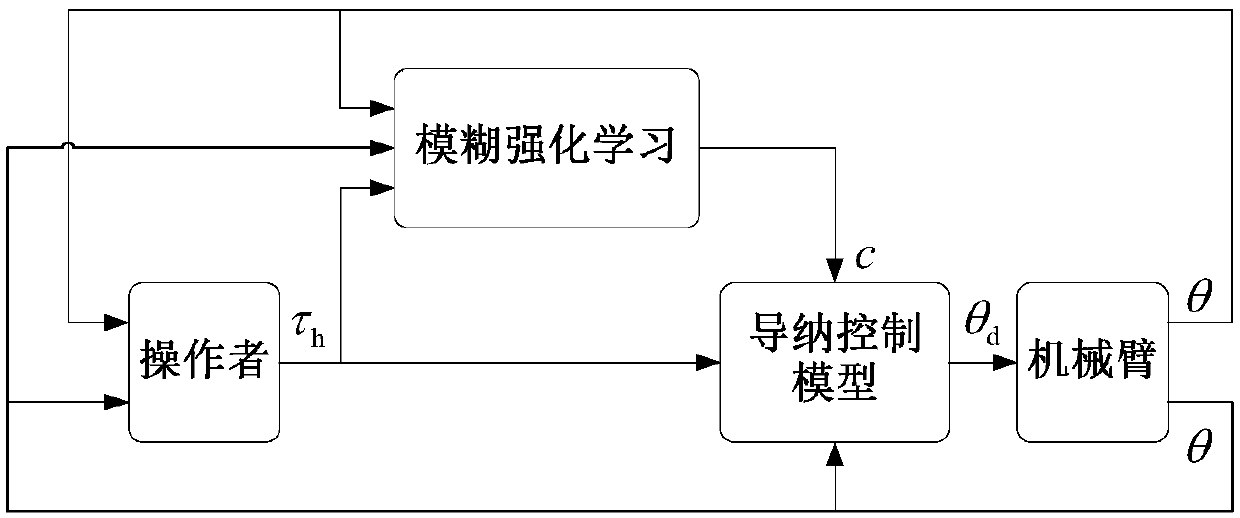
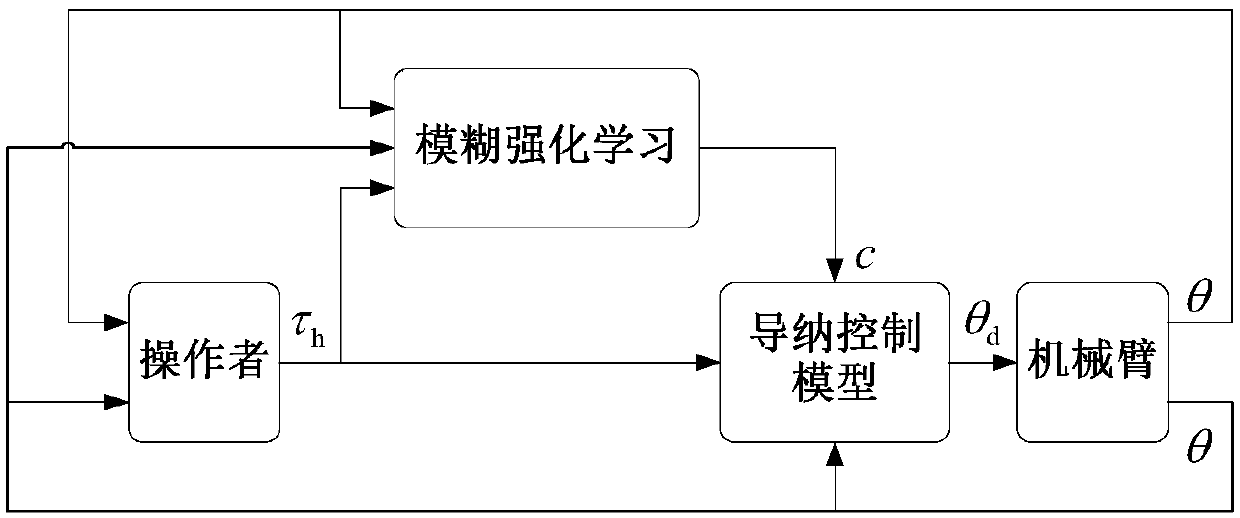
[0031] Such as figure 1 As shown, a method for controlling compliance of a robotic arm based on fuzzy reinforcement learning of the present invention includes the following steps:
[0032] S1: Establish an admittance control model.
[0033] S2: Obtain the motion state of the robotic arm, the external torque applied by the operator, and the environmental return value. The motion state of the robot arm includes the speed and acceleration of each active rotating joint of the robot arm.
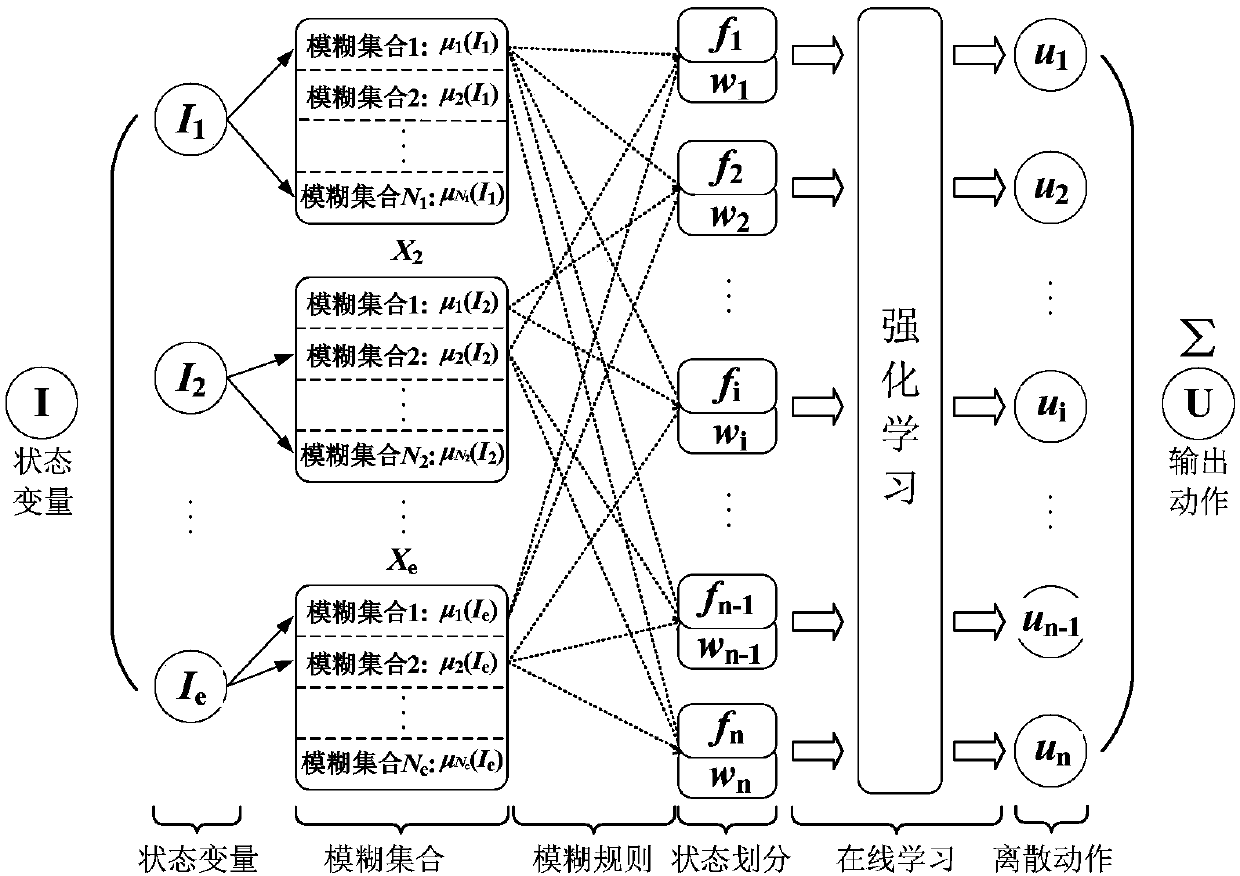
[0034] S3: In order to obtain the admittance model parameter adjustment strategy adapted to the current environment, according to the relevant information obtained in step S2, perform online training of the admittance model parameter adjustment strategy through fuzzy reinforcement learning until the algorithm converges, in order to obtain the current Variable admittance control model adapted to the environment. The fuzzy reinforcement learning in step S3 specifically includes the following steps:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More