

Mobile robot autonomous navigation system and method
An autonomous navigation system and mobile robot technology, applied in control/adjustment systems, instruments, motor vehicles, etc., can solve problems such as high hardware requirements, ineffective effects and cost advantages, and difficult support of embedded platforms, etc., to reduce required effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] In order to enable those skilled in the art to better understand the solutions of the embodiments of the present invention, the embodiments of the present invention will be further described in detail below in conjunction with the drawings and implementations.
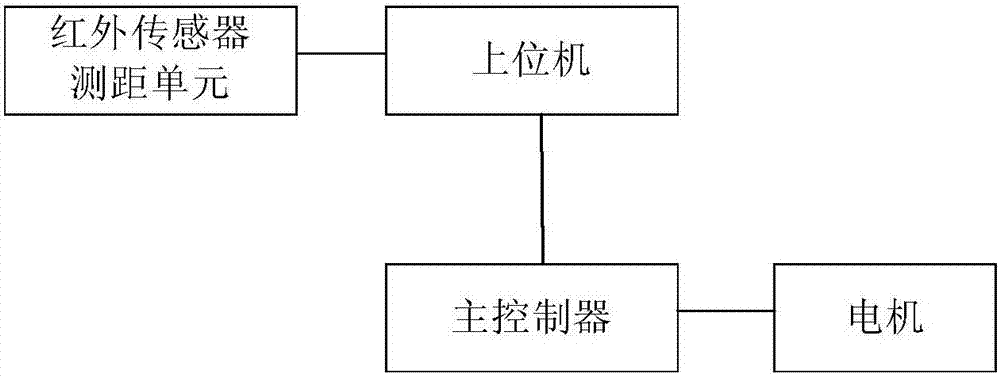
[0072] like figure 1 As shown, it is a schematic structural diagram of the autonomous navigation system of the mobile robot in the embodiment of the present invention.
[0073] In this embodiment, the system includes: an infrared sensor ranging unit, a host computer connected to the infrared sensor ranging unit, a main controller communicating with the upper computer, and a host computer connected to the main controller motor. in:
[0074] An infrared sensor ranging unit is used to measure the distance between one or more obstacles in different directions and the mobile robot in real time;
[0075] The upper computer is used to plan the path of the mobile robot according to the distance between the obstacle a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More