

Snake robot with orthogonal joint structure
A snake-shaped robot and joint structure technology, applied in the field of bionic robots, can solve problems such as insufficient spatial freedom, unreasonable structural design, uneven mass distribution, etc., to improve flexibility and operability, improve passability and Controllability and the effect of reducing the difficulty of maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] This embodiment provides a specific implementation of a snake-like robot with an orthogonal joint structure.
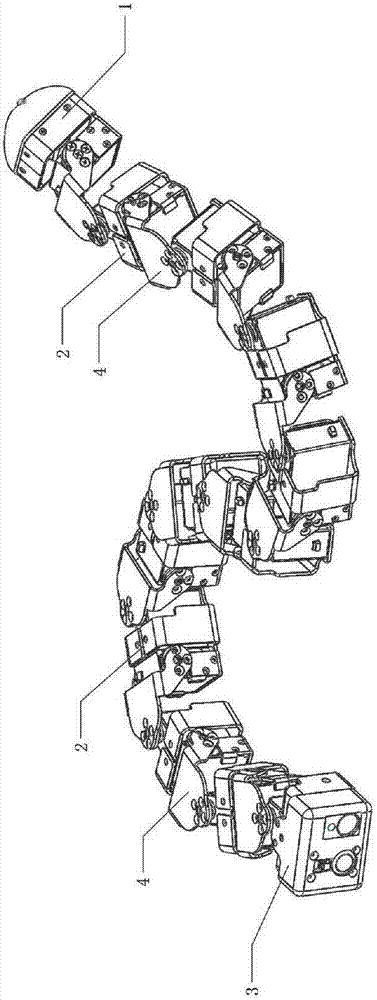
[0041] Such as figure 1 As shown, it is a snake-like robot with an orthogonal joint structure, including a snake head joint 1 , a plurality of snake body joints 2 and a snake tail joint 3 sequentially connected end to end by a plurality of joint connectors 4 . The snake head joint 1, snake body joint 2 and snake tail joint 3 are all approximately cuboid structures, and the longitudinal sections of the joints along the direction perpendicular to the snake body have basically the same shape, which are square or rectangular, so as to ensure the passability in narrow spaces. Preferably, in order to maintain stability and reduce rollover, the section is a rectangle whose width is greater than the height.
[0042] Such as Figures 2 to 5 As shown, the snake body bracket 21 of the snake body joint 2 is provided with a horizontal steering gear 51 for horizontal rotat...
Embodiment 2
[0048] According to the snake robot described in Embodiment 1, this embodiment provides a further embodiment of the snake body joint.
[0049] Such as Figures 2 to 7 As shown, a snake body joint of a snake robot includes a horizontal steering gear 51 arranged on the snake body bracket 21 for connecting with the front adjacent joint, a longitudinal steering gear 52 connected with the rear adjacent joint, and a A battery 6 for power supply and a circuit board 7 for control. The battery 6 is electrically connected to the circuit board 7 , and the circuit board 7 is electrically connected to the horizontal steering gear 51 and the longitudinal steering gear 52 .
[0050] Such as Figure 6 As shown, the snake body bracket 21 is a cubic frame structure with front and rear openings, and the first warehouse body 211 of a rectangular structure for installing the horizontal steering gear 51, the battery 6 and the circuit board 7 is provided at the center position, and the rear positi...
Embodiment 3
[0054] According to the snake robot described in Embodiment 1, this embodiment provides a further embodiment of the snake head joint structure.
[0055] Such as Figures 12 to 17 As shown, the snake head joint of the snake robot includes a longitudinal steering gear 52 arranged on the snake head bracket 11 for connecting with the rear adjacent joints, a battery 6 for power supply and a circuit board 7 for control, and is arranged on the The snake head cover 12 of snake head support 11 front ends. The battery 6 is electrically connected to the circuit board 7 , and the circuit board 7 is electrically connected to the longitudinal steering gear 52 .
[0056] Such as Figure 16 As shown, the head support 11 is a cubic frame structure with front and rear openings, the front part is provided with a third warehouse body 111 of a rectangular structure for installing the battery 6 and the circuit board 7 and connecting the snake head cover 12, and the rear part is provided with a T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More