

Ferromagnetism wall climbing working robot
A robot and ferromagnetic technology, which is applied in the field of robots, can solve the problems of poor load capacity of robots, permanent magnet self-heavyness, poor motion flexibility, etc., and achieve the effects of excellent motion flexibility, excellent adsorption performance, and strong load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
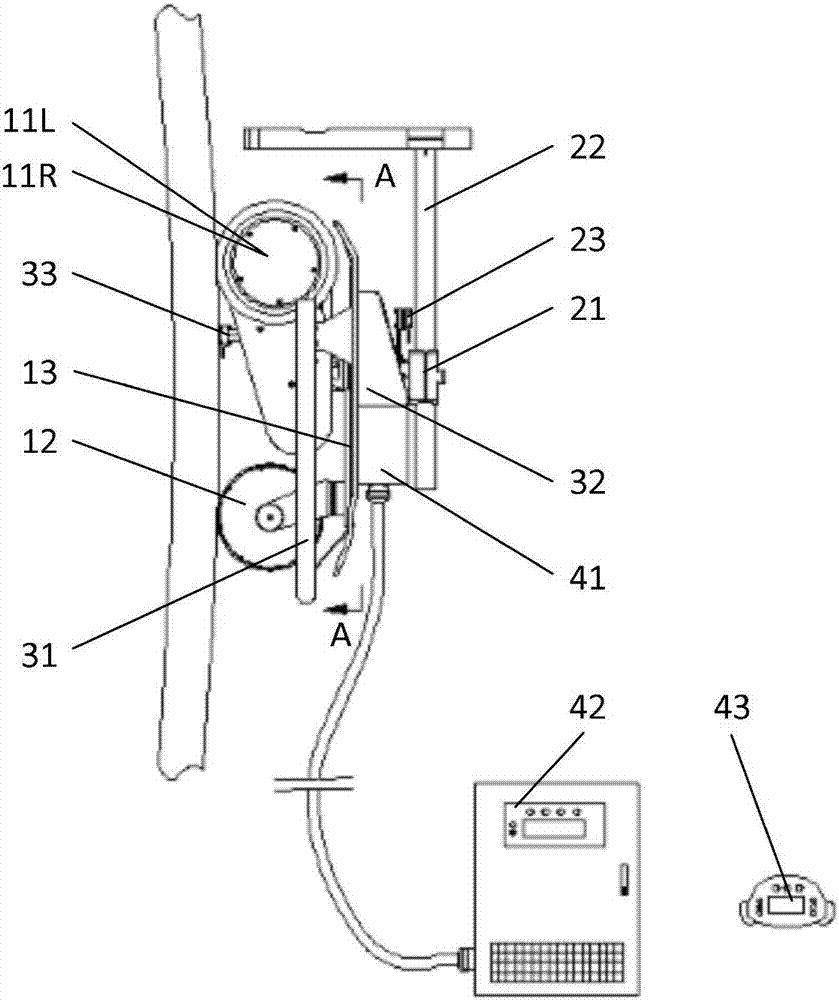
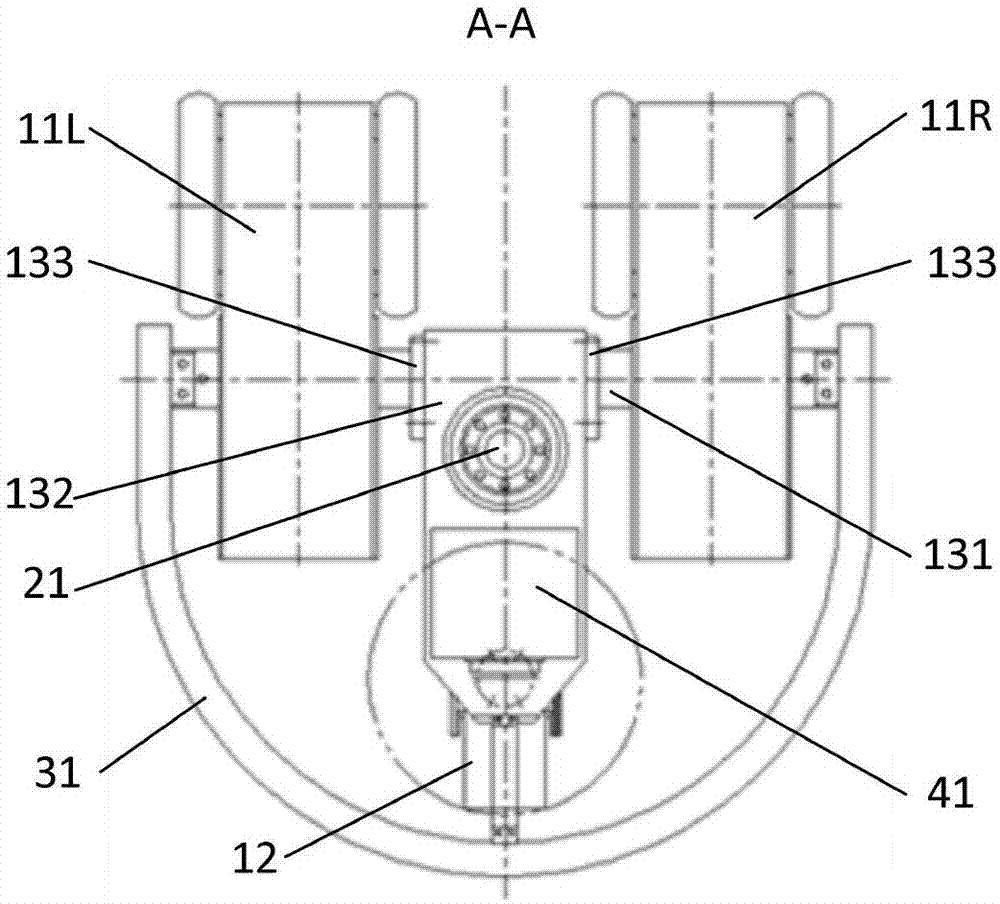
[0019] Such as figure 1 and figure 2 As shown, a ferromagnetic wall-climbing working robot includes a walking unit 1 , a swing unit 2 , a protection unit 3 and a control unit 4 . The walking unit 1 includes a left drive wheel assembly 11L, a right drive wheel assembly 11R, a universal wheel assembly 12 and a frame assembly 13, and the two drive wheel assemblies 11L, 11R are coaxially and symmetrically mounted on the front bottom of the frame assembly 13, The universal wheel assembly 12 is mounted on the rear bottom of the frame assembly 13 to form a stable isosceles triangle. The normal walking state of the robot is that two driving wheel assemblies 11L, 11R are in front and a universal wheel assembly 12 is behind, which can realize functions such as adsorption of the wall-climbing robot on a ferromagnetic wall, forward and backward walking, and left and right turning.
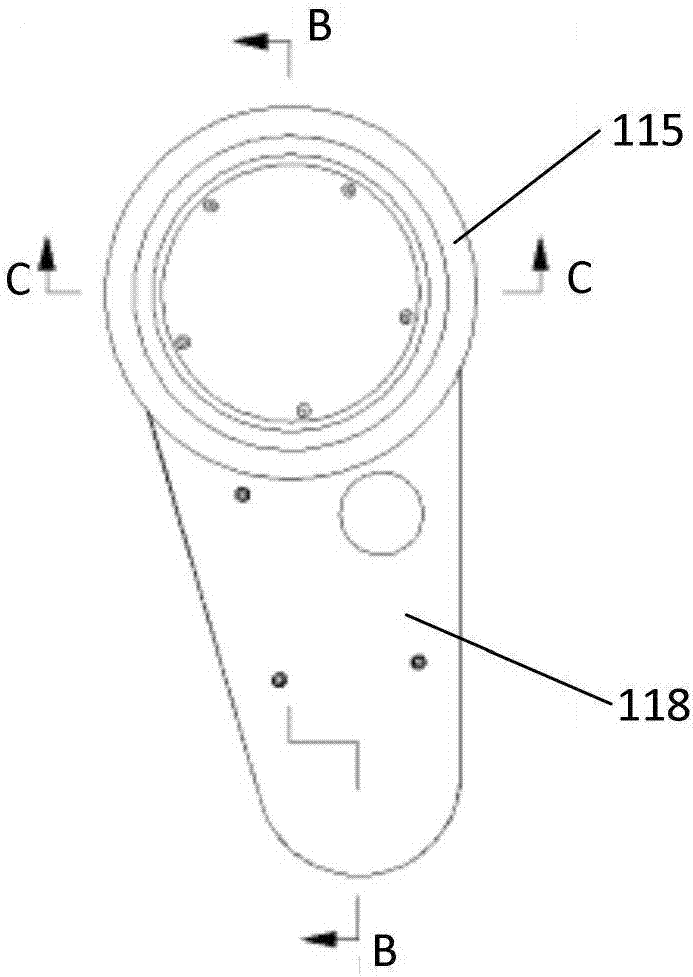
[0020] Such as Figure 3 ~ Figure 5 As shown, the drive wheel assemblies 11L, 11R each include two skel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More