

Welding robot welding path planning method based on discrete particle swarm optimization
A welding robot, discrete particle swarm technology, applied in instruments, computing, manipulators, etc., can solve the problems of robot parts wear, impact, welding gun jitter, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] like Figure 1-4 As shown, a welding robot welding path planning method based on discrete particle swarm optimization algorithm, including the following steps:
[0060] Step 1: Establish a mathematical model of the path of the welding robot;
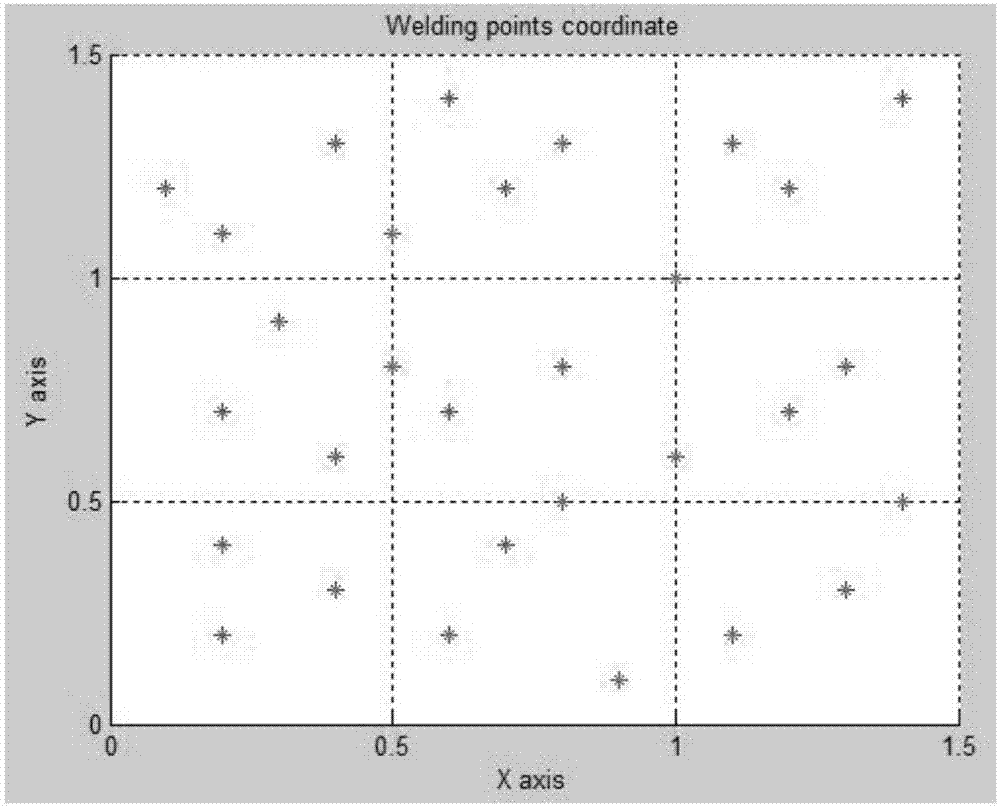
[0061] The path optimization problem of a welding robot can be described as: if n welding points need to be welded, the robot starts from a certain welding point to weld all the welding points and then returns to the initial welding point. Knowing the position coordinates of each welding spot, it is required to plan the welding operation sequence reasonably so that the robot can travel the shortest distance and meet the following constraints:
[0062] (1) The welding robot starts and ends with a certain welding point;
[0063] (2) Each solder joint must be welded only once.
[0064] Its mathematical model is expressed as follows:
[0065]
[0066]
[0067]
[0068]
[0069]
[0070] where: d ij Indicates the di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More