

Trajectory tracking control method for mobile robot based on sliding mode variable structure
A mobile robot, sliding mode variable structure technology, applied in two-dimensional position/channel control, etc., can solve problems such as system instability and trajectory tracking failure, achieve good stability and robustness, improve accuracy, and reduce vibration The effect of the vibration phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is described in detail below in conjunction with accompanying drawing:
[0033] Such as Figure 1-Figure 8 As shown, the present invention designs a mobile robot trajectory tracking control method based on sliding mode variable structure, comprising the following steps:
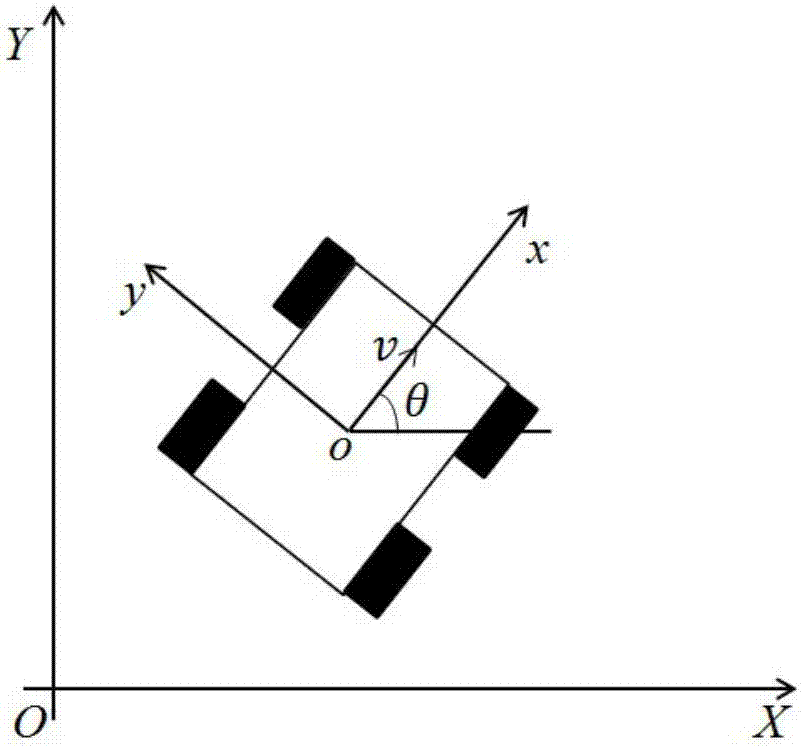
[0034] Step (1) establishes the kinematics model of mobile robot;
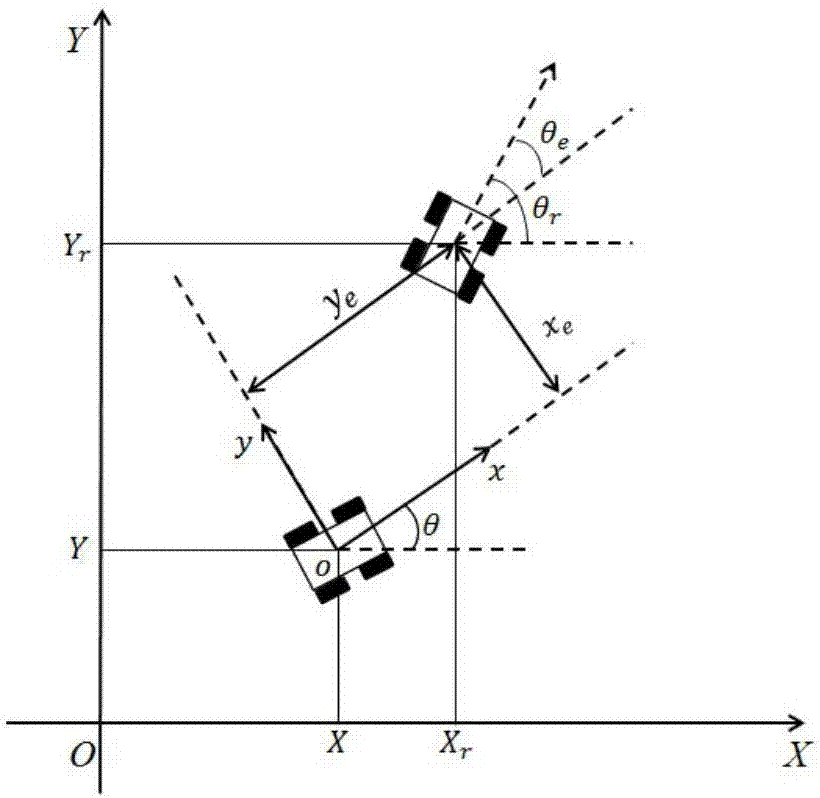
[0035] Step (2) establishes the trajectory tracking error model of the mobile robot, and derives the trajectory tracking error differential equation;
[0036] Step (3) Design an appropriate switching function (s 1 ,s 2 ) T ;
[0037] Step (4) Analyze the advantages and disadvantages of different reaching laws, and design a new reaching law Improve the rapidity and stability of the control system, effectively weaken the chattering phenomenon;
[0038] Step (5) according to the switching function of step (3) (s 1 ,s 2 ) T and the reaching law of step (4) Deriving the control law (υ,ω) for the mobile rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More