Small humanoid robot capable of realizing omni-directional walking and control method thereof
A robot and human-like technology, applied in two-dimensional position/channel control and other directions, can solve the problems of small humanoid robots walking in any direction, to facilitate scientific research debugging and competition adaptation, increase scalability and stability, simplify Effects of sheet metal structures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following examples refer to Figure 1-6 .
[0042] Structure example:
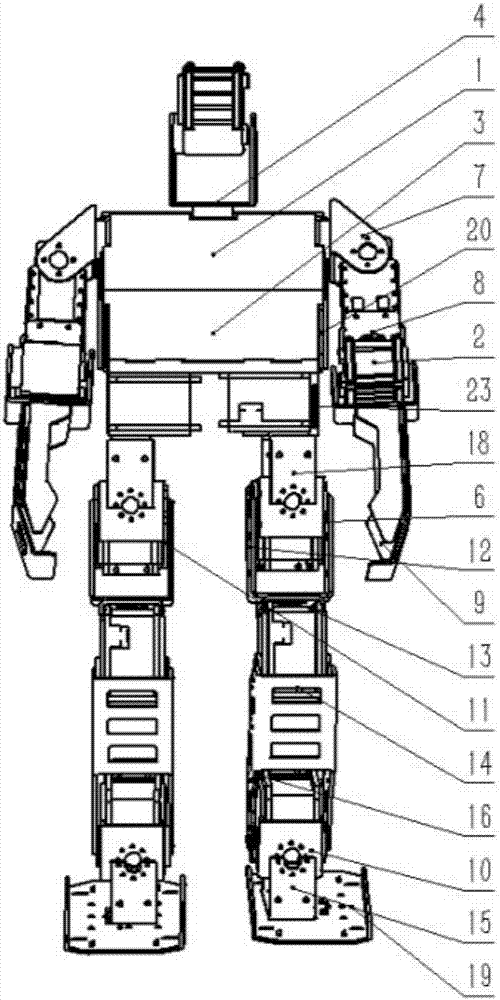
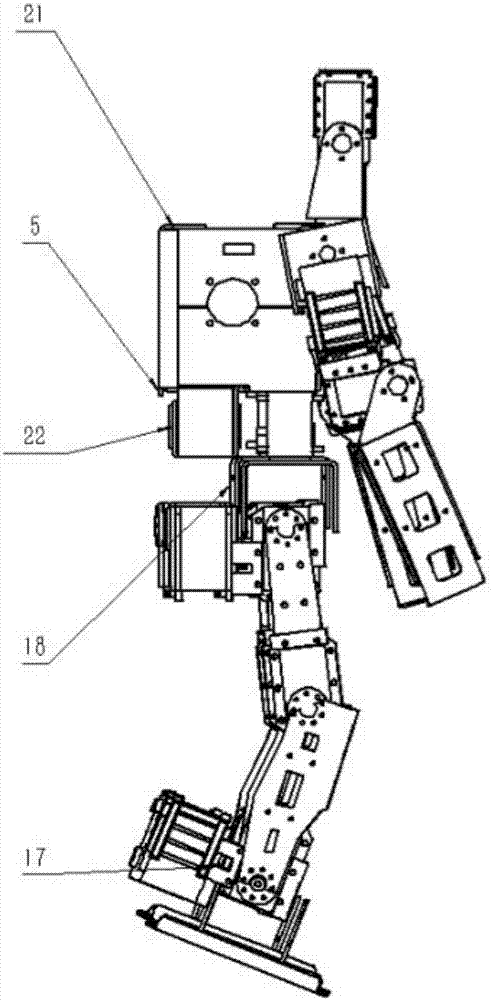
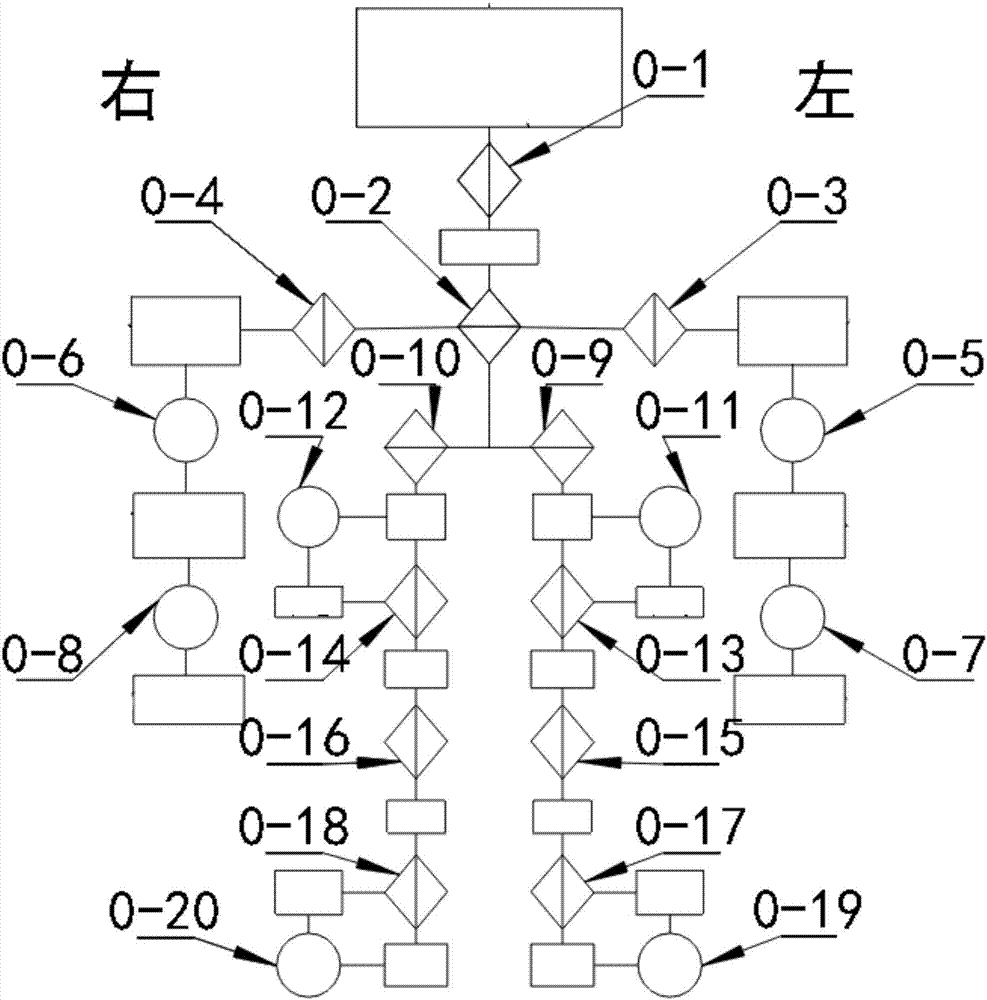
[0043] The small-sized humanoid robot realizing omnidirectional walking of the present invention includes a front chest 1, an AX18 steering gear 2, a core electronic support 3, a head support 4, a battery box baffle 5, a thigh connecting piece 6, a big arm connecting piece 7, and a forearm Connection piece 8, hand 9, ankle connection piece 10, left thigh 11, right thigh 12, calf connection piece 13, calf 14, foot support 15, steering gear spacer 16, steering gear connection piece 17, thigh support 18, sole of foot Plate 19 , forearm attachment 20 , back fender 21 , battery compartment 22 and hand attachment 23 . The steering gear includes the first steering gear 0-1 to the twentieth steering gear 0-20; the front chest 1 and the back baffle 21 form the body through the cooperation of the third steering gear 0-3 and the fourth steering gear 0-4, plus the core The electronic bracket 3 forms a cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com