

Pole-climbing robot and track deviation rectifying method thereof
A robot and pole-climbing technology, applied in the field of pole-climbing robots and their control, can solve the problems of inability to accurately monitor power transmission lines, low personal safety factor of staff, low work efficiency, etc., and achieve high popularization and application value and reduce work intensity. , the effect of improving the level of work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
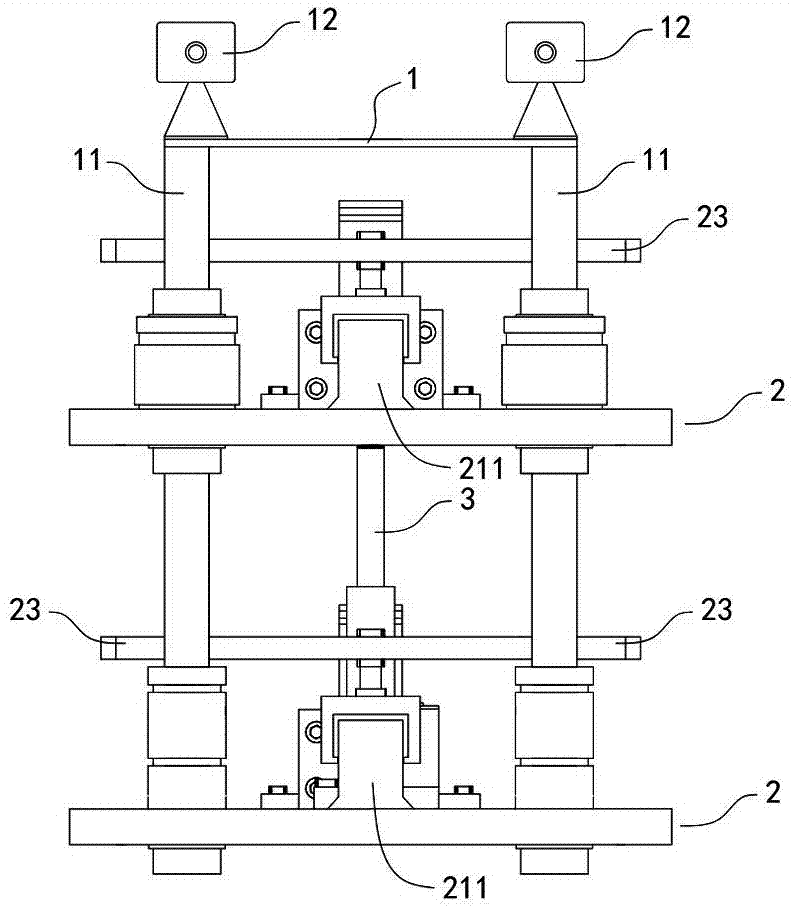
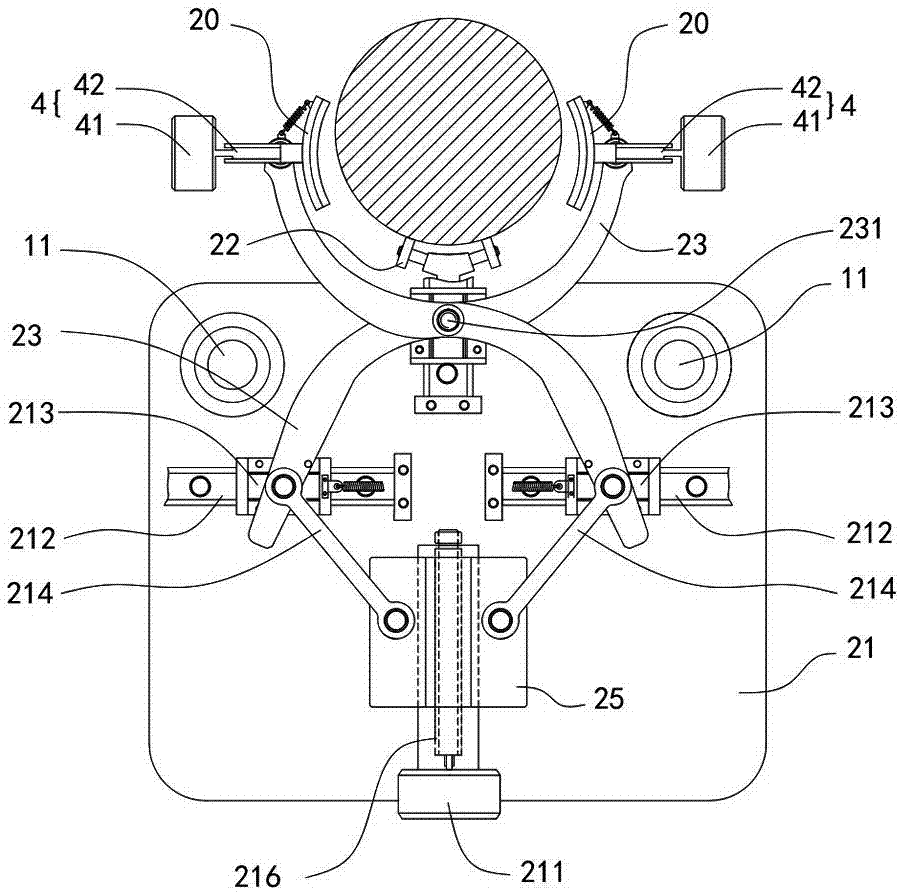
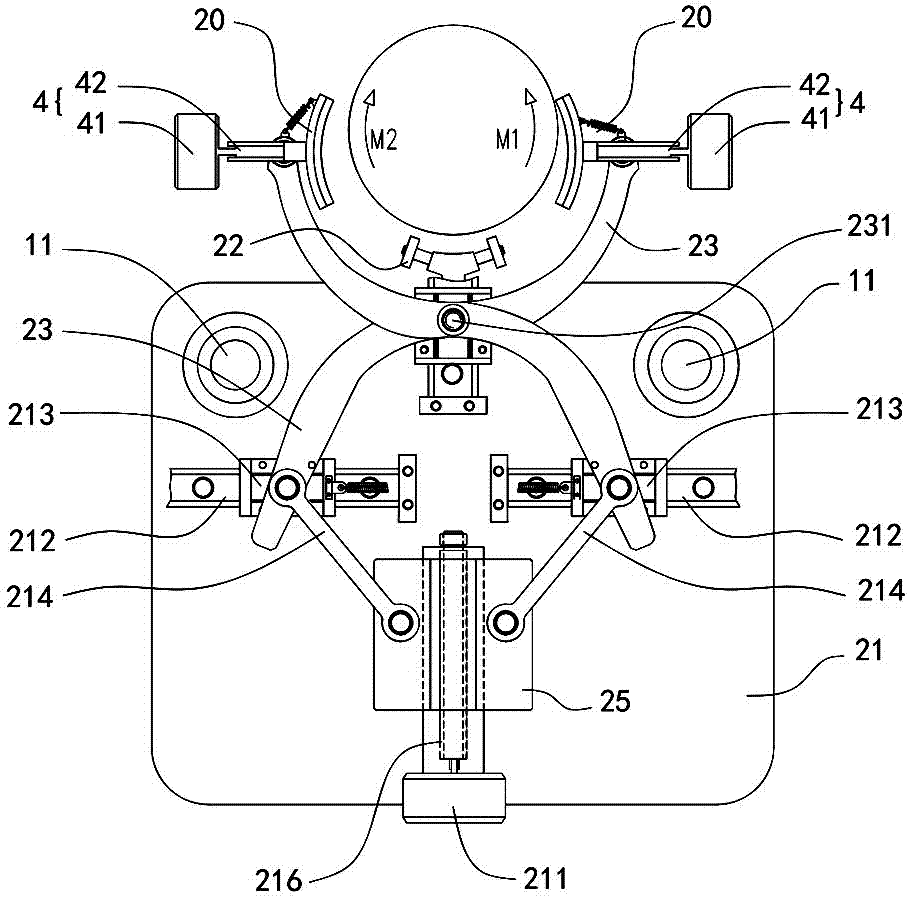
[0028] like figure 1 , figure 2 and image 3 As shown, the pole-climbing robot of this embodiment includes a work platform 1 and a longitudinal guide rail 11 arranged on the lower side of the work platform 1. A camera 12 is arranged on the work platform 1, and two upper and lower pole holding units are arranged on the longitudinal guide rail 11. 2, and an electric push rod 3 is provided between the two pole holding units 2, each pole holding unit 2 includes two left and right grippers 20, and a deviation correction device 4 is provided on the jaws 20, and the deviation correction device 4 includes a deviation correction motor 41 and the deviation-correcting screw 42, the deviation-correcting motor 41 is fixedly arranged on the holding rod unit 2 and the output end is connected with the deviation-correcting screw 42, and the clamping jaw 20 is slidably arranged at the front end of the holding rod unit 2, and the deviation-correcting screw 42 and the clamping claw 20 between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More