Double-jaw type carrying mechanical arm for aluminum alloy forged wheel hub
An aluminum alloy, manipulator technology, applied in manipulators, forging/pressing/hammering machinery, manufacturing tools, etc., can solve the problems of large usage, heavy weight, and the clamping jaw cannot be used for a long time, so as to improve efficiency and save processing. effect of cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
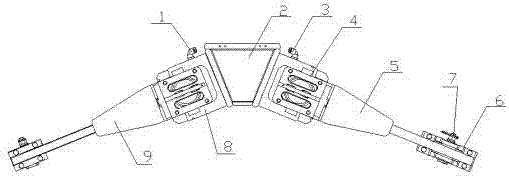
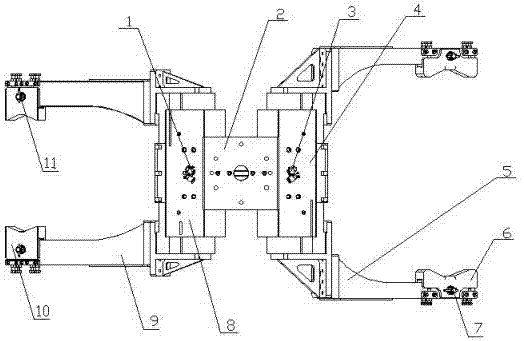
[0012] Depend on figure 1 , figure 2 It is a structural schematic diagram of the present invention, a double-claw type aluminum alloy forged wheel hub handling manipulator, which consists of a left air outlet 1, an intermediate connector 2, a right air outlet 3, a right synchronous cylinder 4, a right gripper arm 5, and a right V Type jaw block 6, right central shaft 7, left synchronous cylinder 8, left jaw arm 9, left V-shaped jaw block 10, left central shaft 11; the intermediate connector is used to connect the right synchronous cylinder and the left Synchronize the cylinder and the robot. The two surfaces on which the right and left synchronous cylinders are installed are symmetrically inclined at 22 degrees, so that the right and left synchronous cylinders are symmetrically inclined at 22 degrees. The working area is larger.
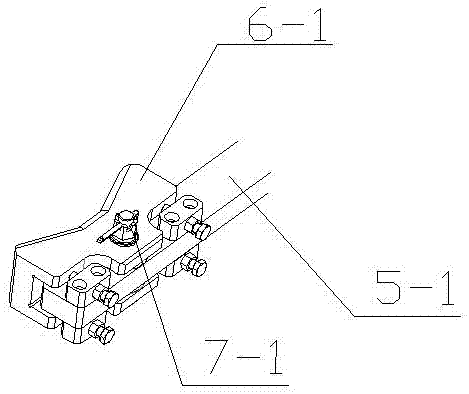
[0013] The right gas outlet 3 is installed on the right synchronous cylinder 4, the right V-shaped jaw block 6 is installed on the right jaw arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More