

Motion control method and device of robot
A control method and robot technology, applied in the field of robots, can solve problems such as unsmooth, difficult to master, unnatural movements, etc., and achieve the effect of accurate movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] This embodiment provides a method for controlling robot actions, which is used to collect human actions for robots to imitate and copy, usually performed by a robot action control device, which is implemented by software and / or hardware, and is generally integrated into a computer and its auxiliary equipment.
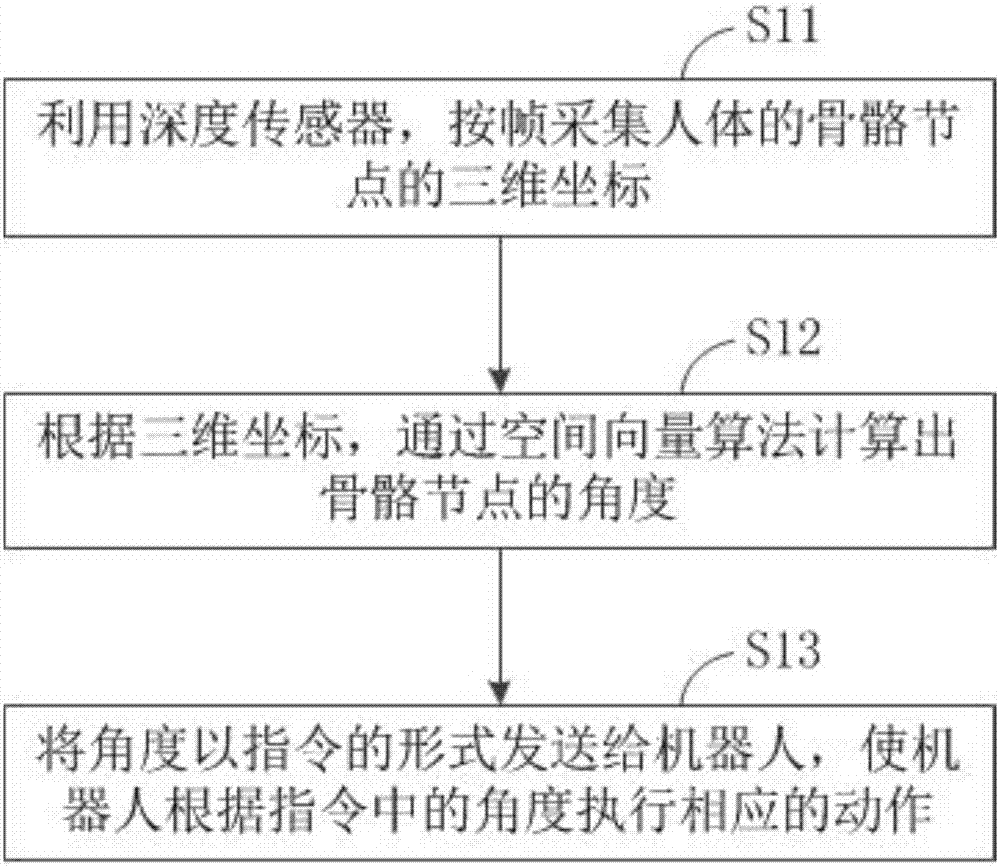
[0053] Such as figure 1 As shown, the control method of the robot action includes the following steps:
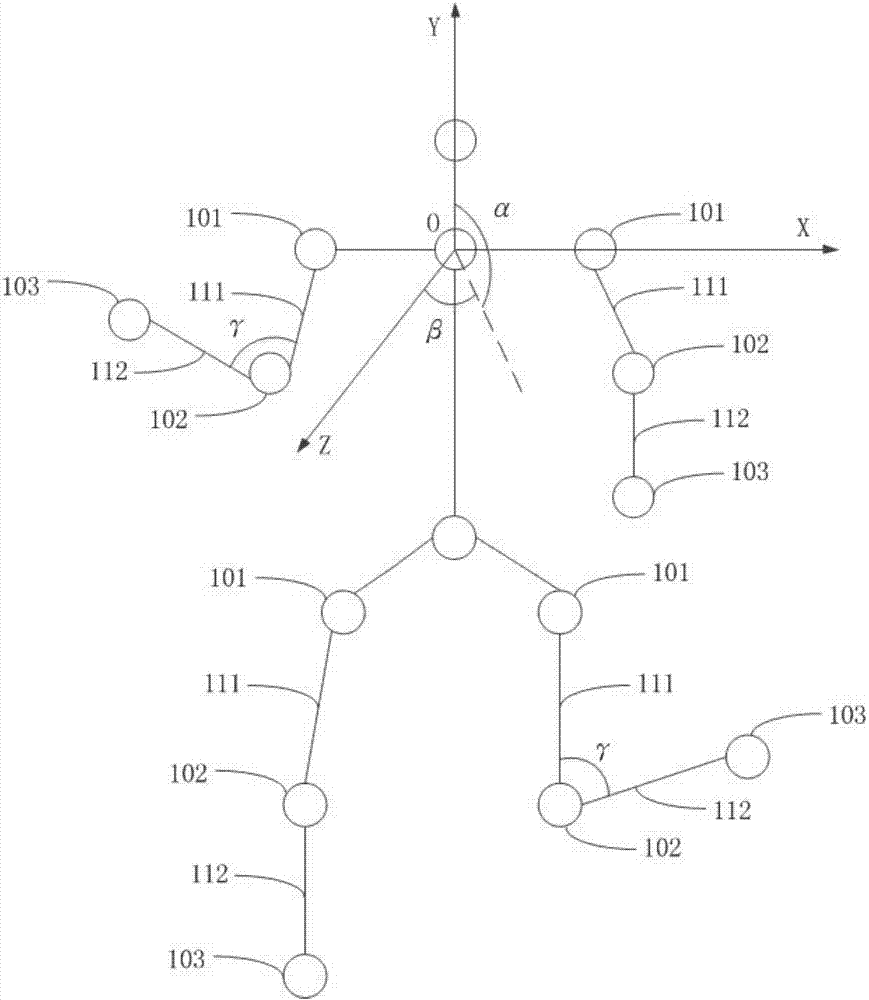
[0054] S11, using the depth sensor to collect the three-dimensional coordinates of the skeleton nodes of the human body frame by frame.
[0055] The depth sensor is generally a CMOS infrared sensor (infrared camera). Through infrared imaging, the image in its field of view is expressed in the form of black and white spectrum to form a depth of field image. Pure black represents infinite distance, pure white represents infinite nearness, and different gray levels Corresponding to different distances from the object to the sensor. The depth sensor captures th...
Embodiment 2
[0080] This embodiment provides a control method for robot actions, which is applied to robots. Through the control method, the robot can copy human actions; the control method is executed by a robot action control device, which is controlled by software and / or Or hardware implementation, generally integrated inside the robot.
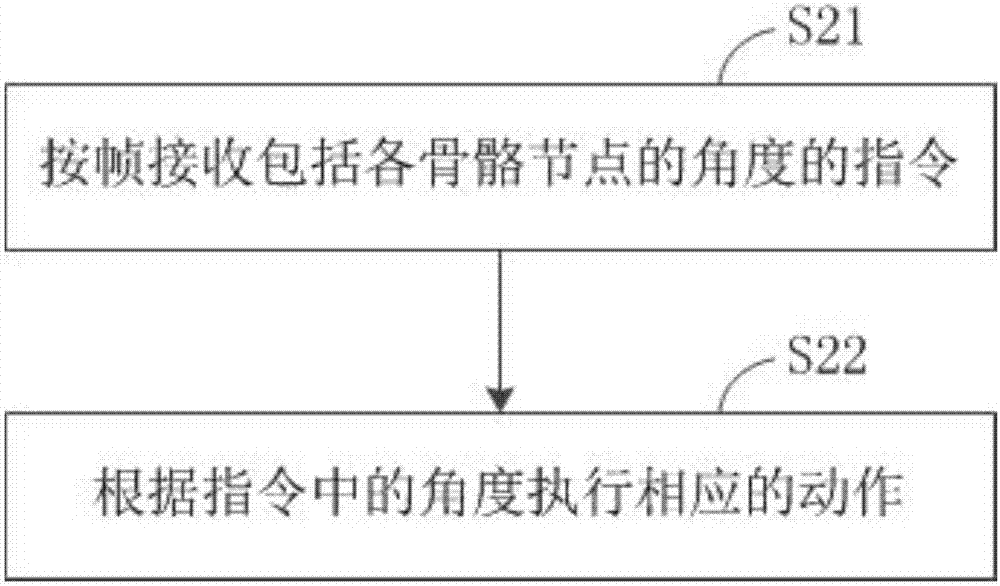
[0081] image 3 It is a flow chart of the control method of the robot action in the second embodiment of the present invention. Such as image 3 As shown, the control method includes the following steps:
[0082] S21. Receive instructions including angles of each skeletal node by frame.
[0083] The robot receives the instructions generated in the above embodiments through the network, one instruction per frame, the instruction includes the angle of each skeletal node, and if necessary, the movement speed of the skeletal node.
[0084] S22. Execute a corresponding action according to the angle in the instruction.
[0085] The instructions are anal...
Embodiment 3
[0088] This embodiment provides a robot action control device for implementing the control method described in Embodiment 1 to solve the same technical problem and achieve the same technical effect. The device is generally a computer and its auxiliary equipment.
[0089] Figure 4 It is a structural schematic diagram of the control device for the robot action in the third embodiment of the present invention. Such as Figure 4 As shown, the control device includes:
[0090] The depth sensor 31 is used to collect the three-dimensional coordinates of the skeleton nodes of the human body frame by frame.
[0091] The microprocessor 32 is used to calculate the angle of the skeletal node through a space vector algorithm.
[0092] The network communication device 33 is configured to send the angle to the robot in the form of an instruction, so that the robot performs corresponding actions according to the angle in the instruction.
[0093] In this embodiment, the depth sensor can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More