

Special-shape trajectory control method and device
A trajectory control and trajectory technology, which is applied in the field of special-shaped trajectory control methods and devices, can solve problems such as slow or fast single-axis division speed, acceleration shock, and uneven trajectory point data, so as to improve product quality and production efficiency. Stability and processing speed, the effect of precise arrangement of thread pin density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
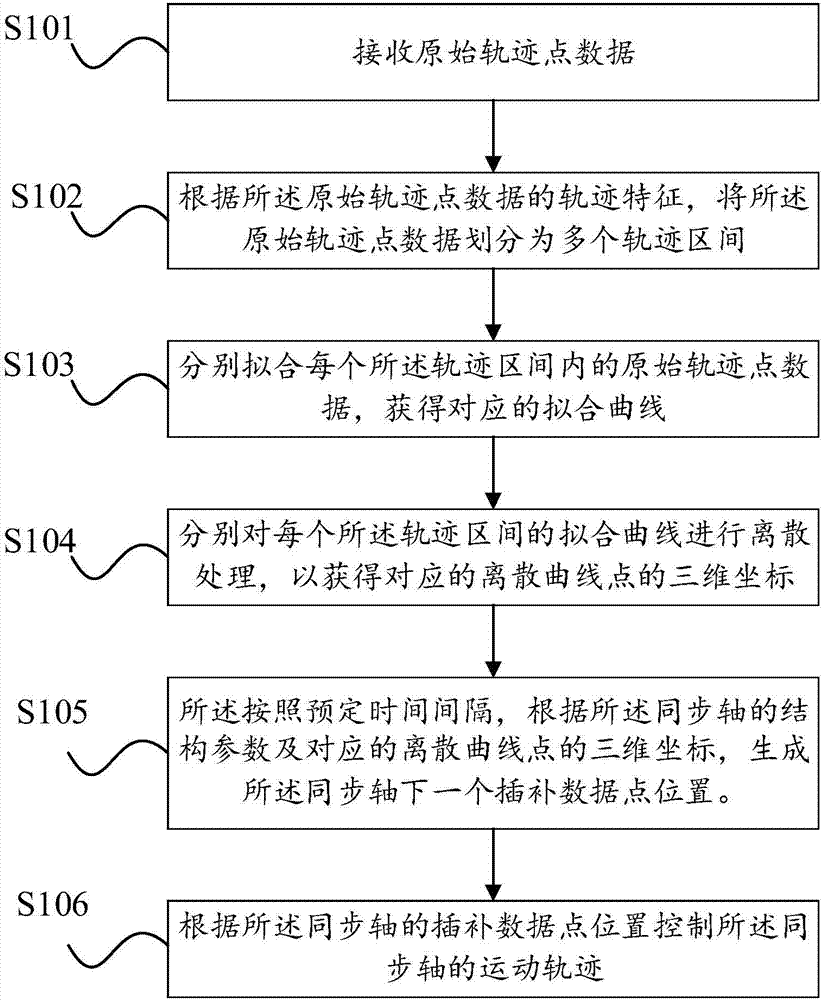
[0030] Please refer to figure 2 , figure 2 It is a flow chart of a method for controlling a special-shaped trajectory provided by a preferred embodiment of the present invention. The special-shaped trajectory control method comprises the following steps:
[0031] Step S101, receiving original trajectory point data.
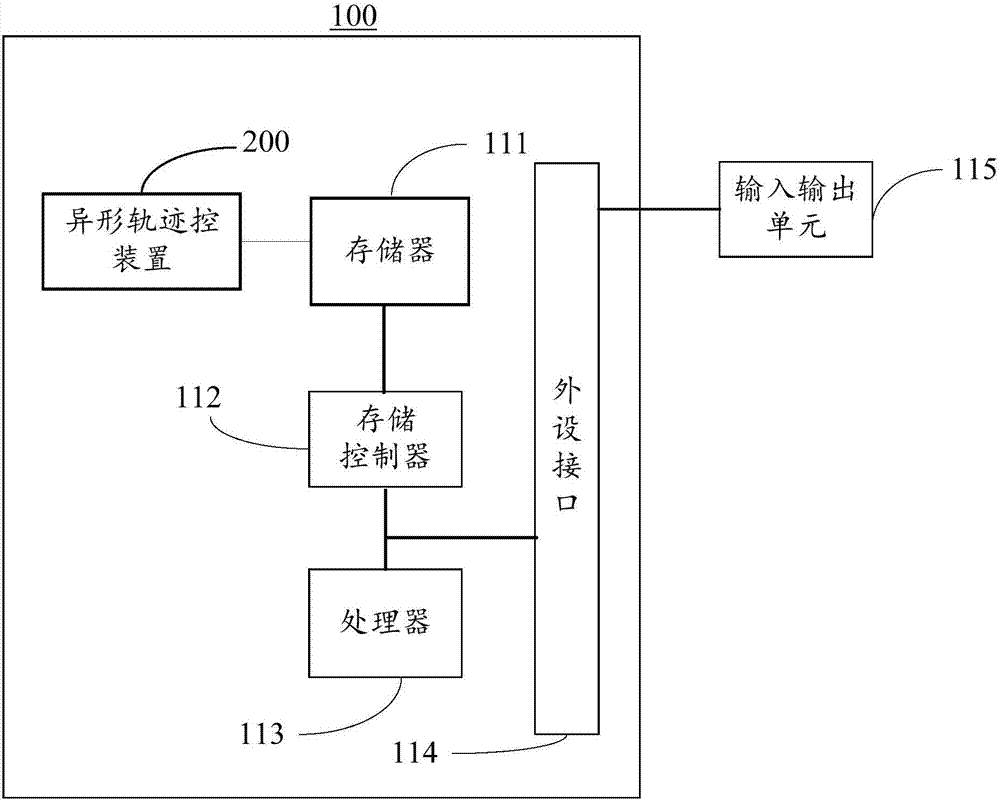
[0032] In this embodiment, the motion controller 100 receives the original track point data of the user's desired synchronous shaft running track, which is input by the user. The original track point data includes a plurality of original track points and three-dimensional coordinates of the original track points. The three-dimensional coordinates may be the coordinate values of the original trajectory point in the three-dimensional Cartesian coordinate system. Generally, the position of the original trajectory point input is messy. And there are certain errors.
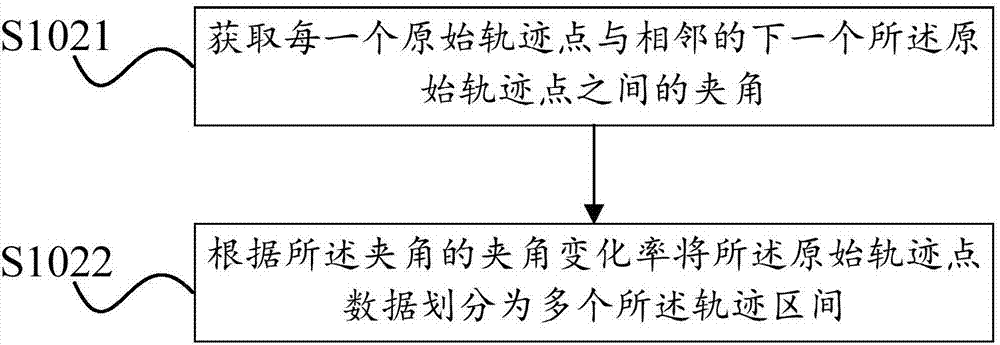
[0033] Step S102: Divide the original trajectory point data into multiple trajectory interva...
no. 2 example
[0081] Please refer to Image 6 , is the special-shaped trajectory control device 200 provided by the preferred embodiment of the present invention. The special-shaped trajectory control device 200 includes: a receiving module 201 , a division module 202 , a fitting module 203 , a discrete module 204 , a generation module 205 and a control module 206 .
[0082] The receiving module 201 is configured to receive original trajectory point data.
[0083] In the embodiment of the present invention, the step S101 may be executed by the receiving module 201 .
[0084] The division module 202 is configured to divide the original trajectory point data into multiple trajectory intervals according to the trajectory characteristics of the original trajectory point data.
[0085] In the embodiment of the present invention, the step S102 may be executed by the dividing module 202 . Such as Figure 7 As shown, the division module 202 includes the following submodules:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More