

High-precision mechanical arm hand-eye camera calibration method and system
A hand-eye camera and calibration method technology, which is applied in image data processing, instruments, calculations, etc., can solve the problems that the high-precision calibration method has not been solved, and achieve the effect of realizing high-precision positioning and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
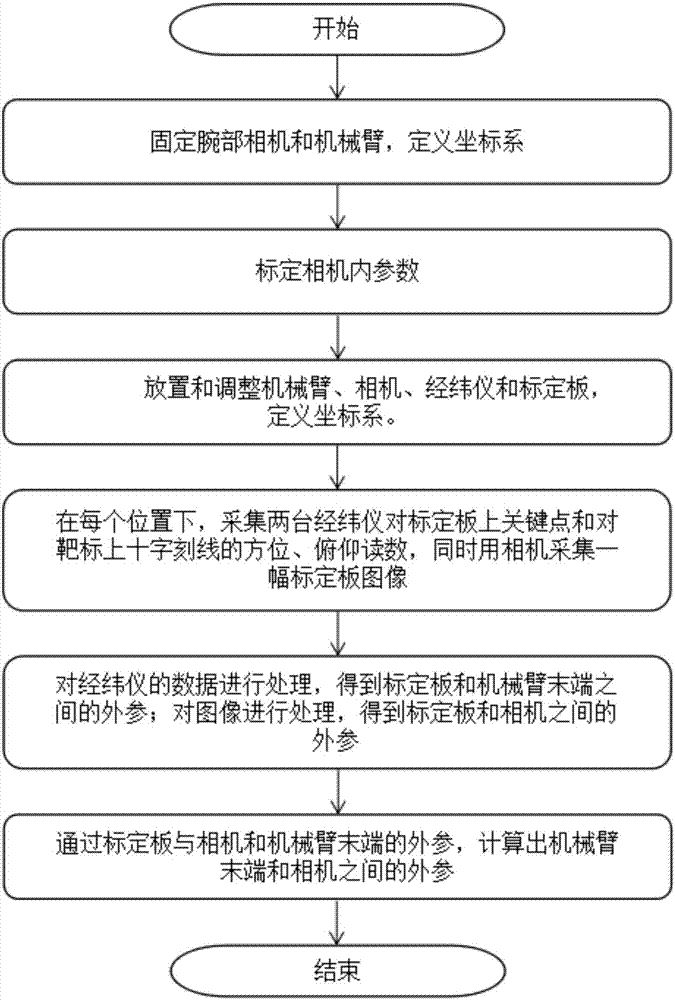
[0046] The high-precision mechanical arm hand-eye camera calibration method disclosed in the present invention, such as figure 1 shown in the process.
[0047] A specific implementation example includes the following steps:
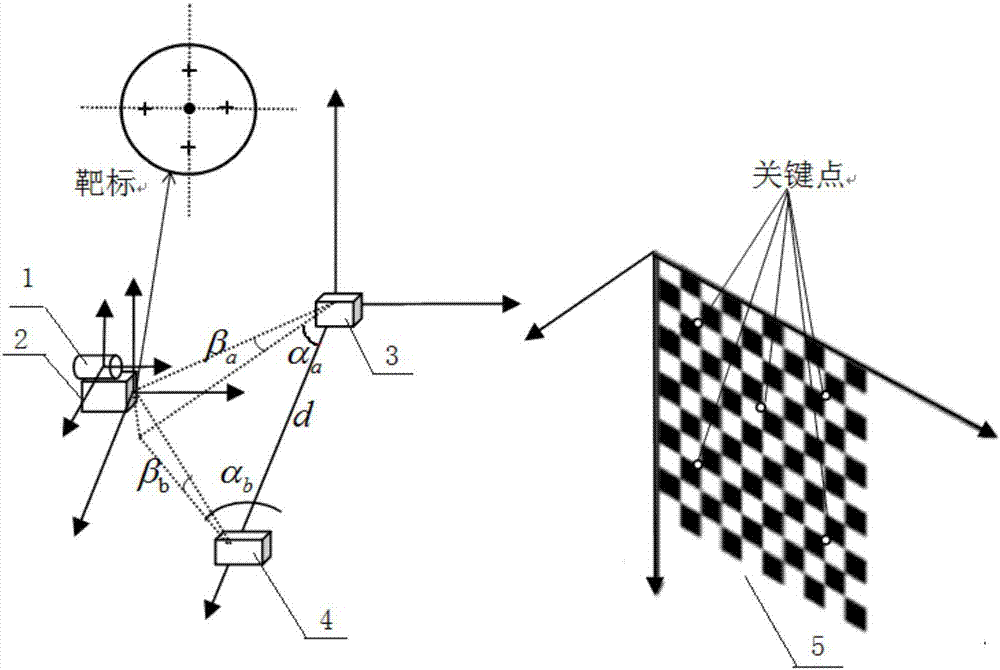
[0048] 1) see figure 2 , fix the wrist camera 1 and the robotic arm 2 together, and ensure that their relative positions and camera internal parameters will not change. Select the calibration board 5, which is a checkerboard calibration board, the number of black and white grids is 25*24, the side length is 15mm, the processing accuracy is better than 0.05mm, the grayscale of the black area and the white area on the checkerboard calibration board image The difference between the values is greater than or equal to 70.
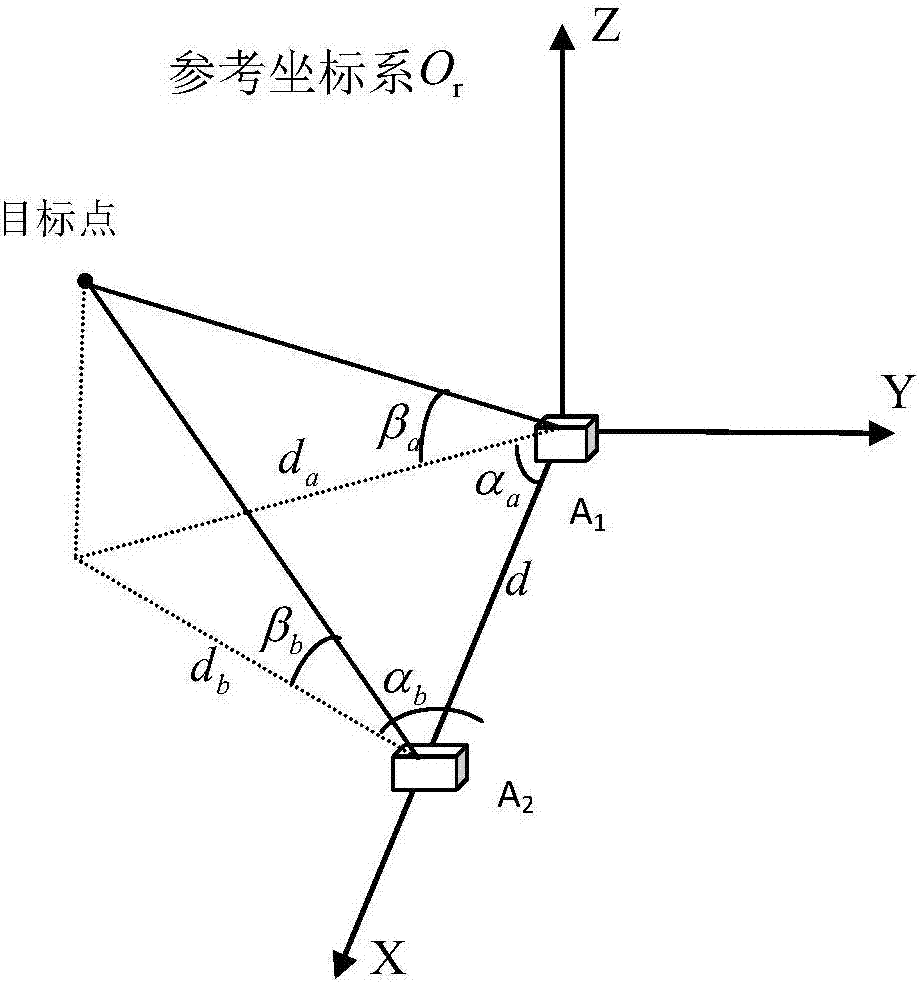
[0049] Place and adjust two high-precision me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More