

Hybrid-driven redundant plane parallel mechanism control device and method
A hybrid drive and control device technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of affecting the performance of parallel mechanisms, existence of singular configurations, small working space, etc., to achieve good driving and control effects and smooth motion. , the effect of eliminating the influence of the transmission mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
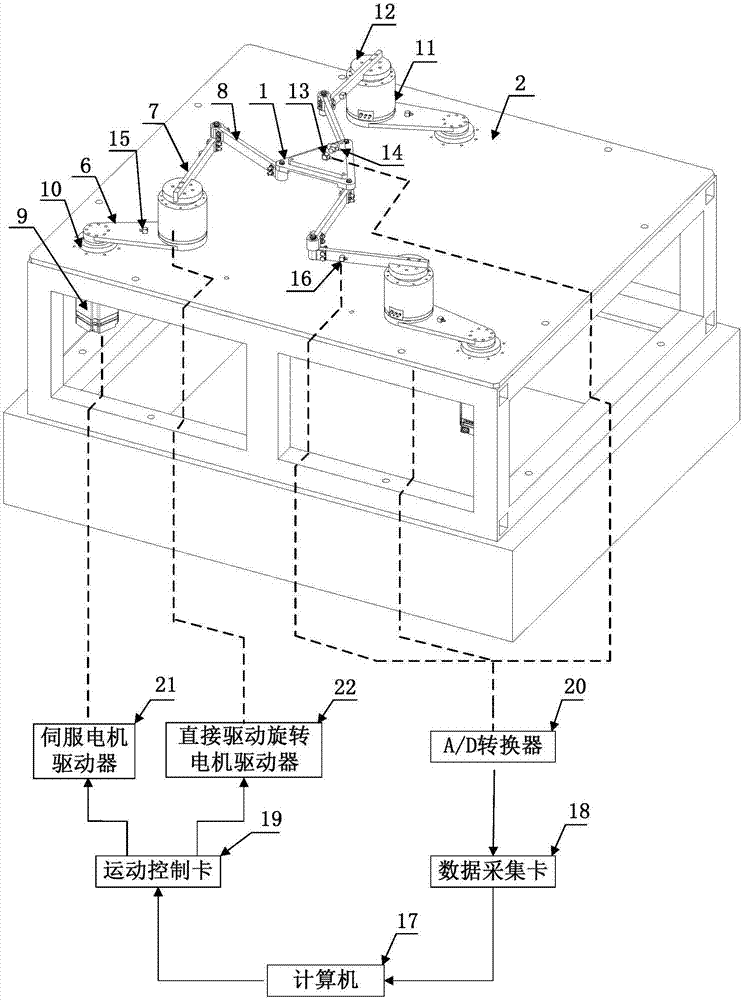
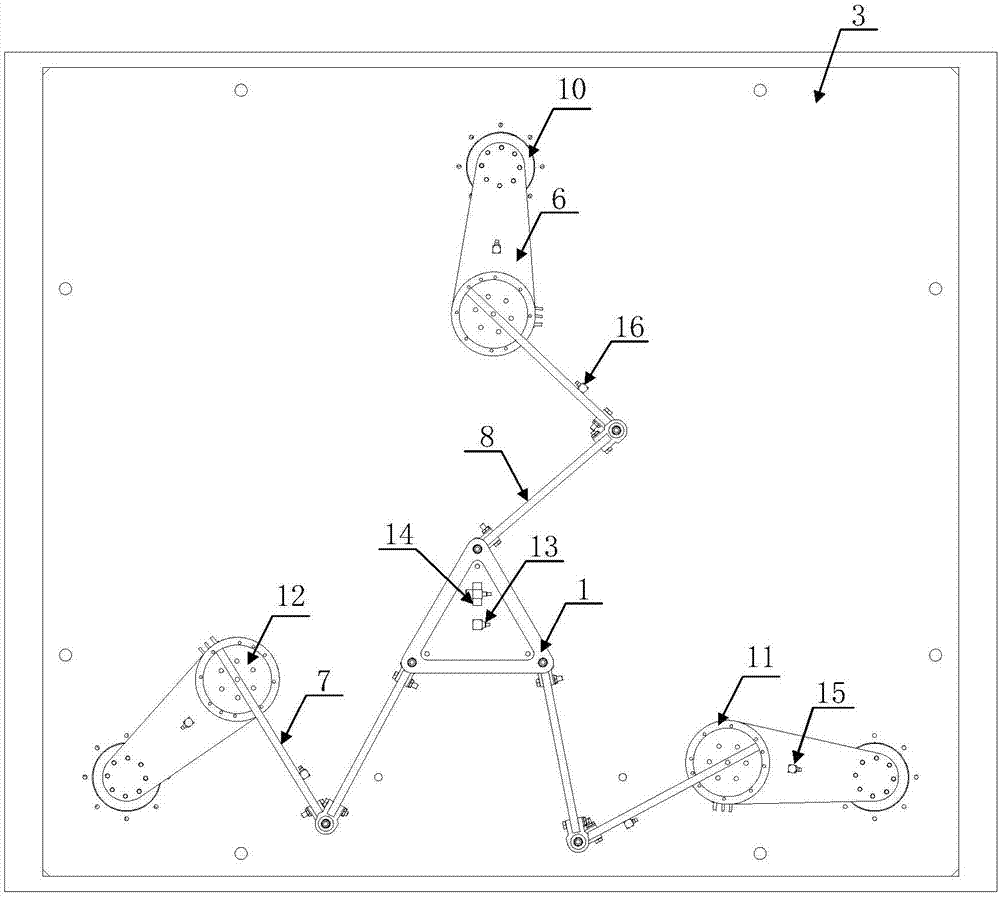
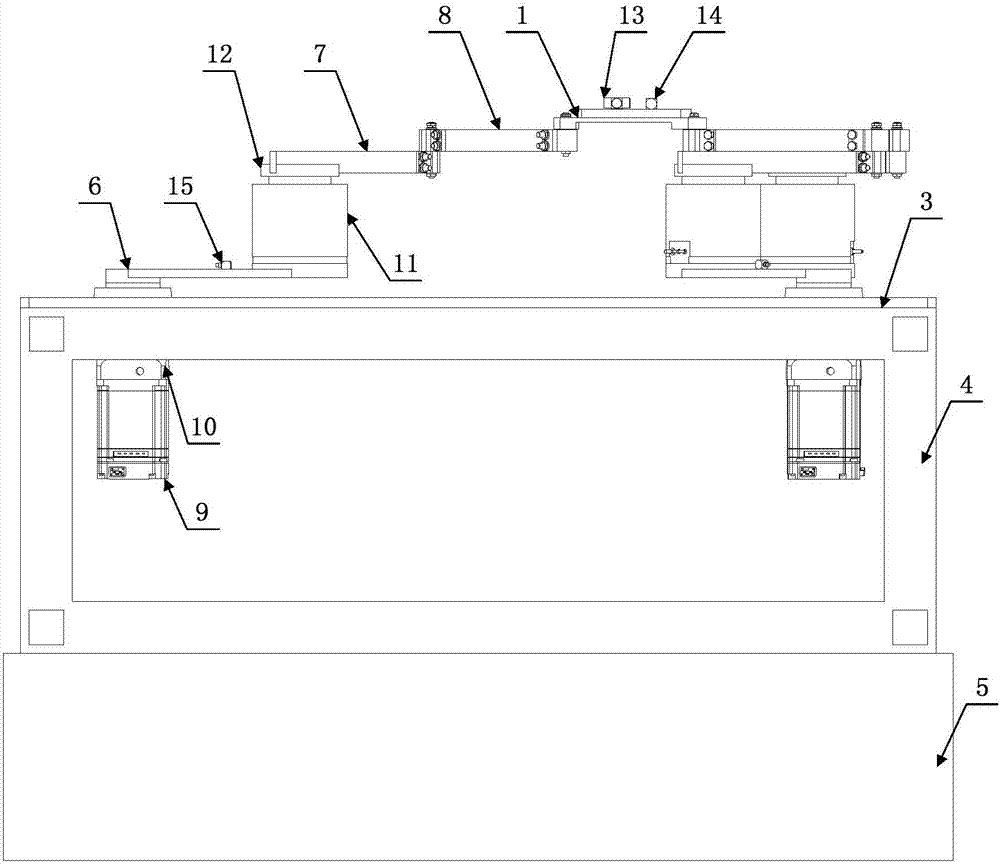
[0042] Such as Figure 1 ~ Figure 3 As shown, this embodiment provides a hybrid drive redundant planar parallel mechanism control device, which includes a parallel mechanism body unit, a detection unit and a control unit; figure 1 The dotted line connection in shows the connection diagram between the electrical signal and the body unit of the parallel mechanism, and the direction arrow shows the transmission direction of the detection and control signal flow;
[0043] The body unit of the parallel mechanism includes a dynamic platform 1, a static platform 2 and three parallel branches;
[0044] The moving platform 1 is a triangular flat plate. In this embodiment, an equilateral triangular flat plate is preferably used. There are three holes at the three corners, and the three corners are respectively connected to three parallel branches through rotating shafts.
[0045] The static platform 2 includes a panel 3, a frame 4 and a base 5, the panel 3, the frame 4 and the base 5 a...
Embodiment 2
[0065] The main feature of this embodiment is: the angular acceleration sensor 14 on the moving platform 1 can also be installed at a distance of 50 mm or 70 mm from the center of the moving platform. All the other are with embodiment 1.
Embodiment 3
[0067] The main features of this embodiment are: the second unidirectional acceleration sensor 16 on the active rod 7 can also be installed at a distance of 60mm or 80mm from the center of the active rod 7, and is located away from the second motor assembly (direct drive rotating motor 11 and At the position of the flange connection piece 12). All the other are with embodiment 1.
[0068]In summary, the present invention transforms on the basis of the 3-RRR (rotation-rotation-rotation branch) planar parallel mechanism to form a 3-RRRR (rotation-rotation-rotation-rotation branch) planar parallel mechanism, specifically in each A drive joint is added to the parallel branch, which is composed of a motor assembly and a drive board, that is, each parallel branch has two drive joints, and the moving platform has only three degrees of freedom in horizontal movement and rotation, so the entire The parallel mechanism is driven redundant, which greatly improves the shortcomings of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More