

A continuous rolling self-calibration and self-alignment method for an inertial platform under a static base
An inertial platform and self-alignment technology, applied in the field of inertial navigation, can solve problems such as frame installation errors, relatively demanding system computing capabilities, and reduced calibration and alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0134] Below in conjunction with accompanying drawing and embodiment, describe technical solution of the present invention in detail:
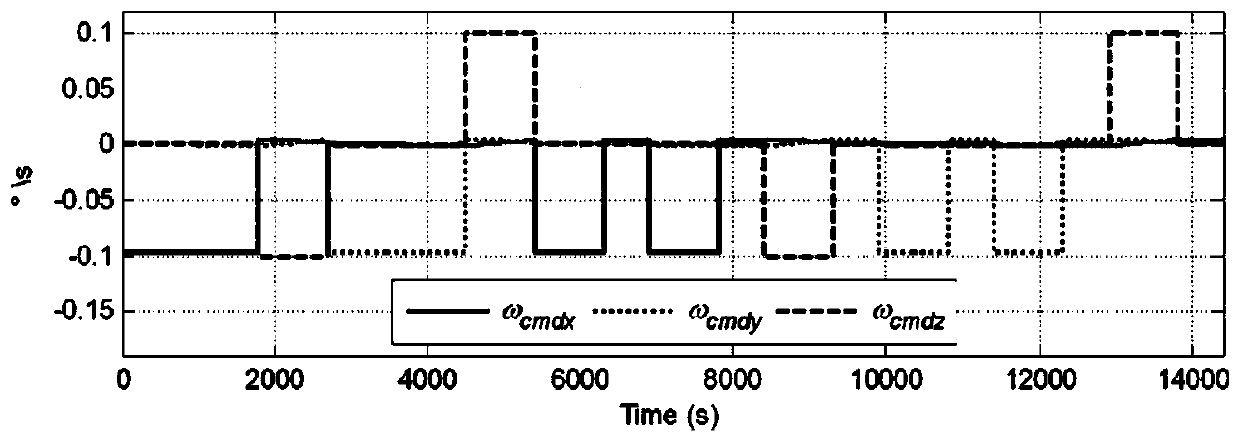
[0135] In the simulation, the generation cycle of the torque instruction is 0.1s, the filter cycle is 1s, the measurement noise of the accelerometer is 0.1μg, and the measurement noise of the gyroscope is 1×10 -4 ° / h, the initial value of the filter attitude angle is the rough alignment result, the initial alignment deviation is 0.02°, and the other initial values are zero, Q and R are set according to the noise characteristics of the inertial instrument, and the P matrix is set as a diagonal matrix. The initial variance of each state quantity is as follows: the attitude angle is 1×10 -7 , the gyroscope zero bias is 1×10 -12 , the primary term of the gyroscope is 1×10 -14 , the accelerometer bias is 1×10 -8 , the accelerometer scale factor error coefficient is 1×10 -8 , the gyroscope installation error is 1×10 -8 , the accelerometer i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More