Travelling control system and method of intelligent spider type robot
A walking control and robot technology, applied in the direction of program control manipulators, manipulators, motor vehicles, etc., can solve the problems of inability to achieve 360 steering movement or mobile processing, unable to meet processing requirements, low work efficiency, etc., and shorten the time required for movement. , The effect of reducing processing cost and convenient positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
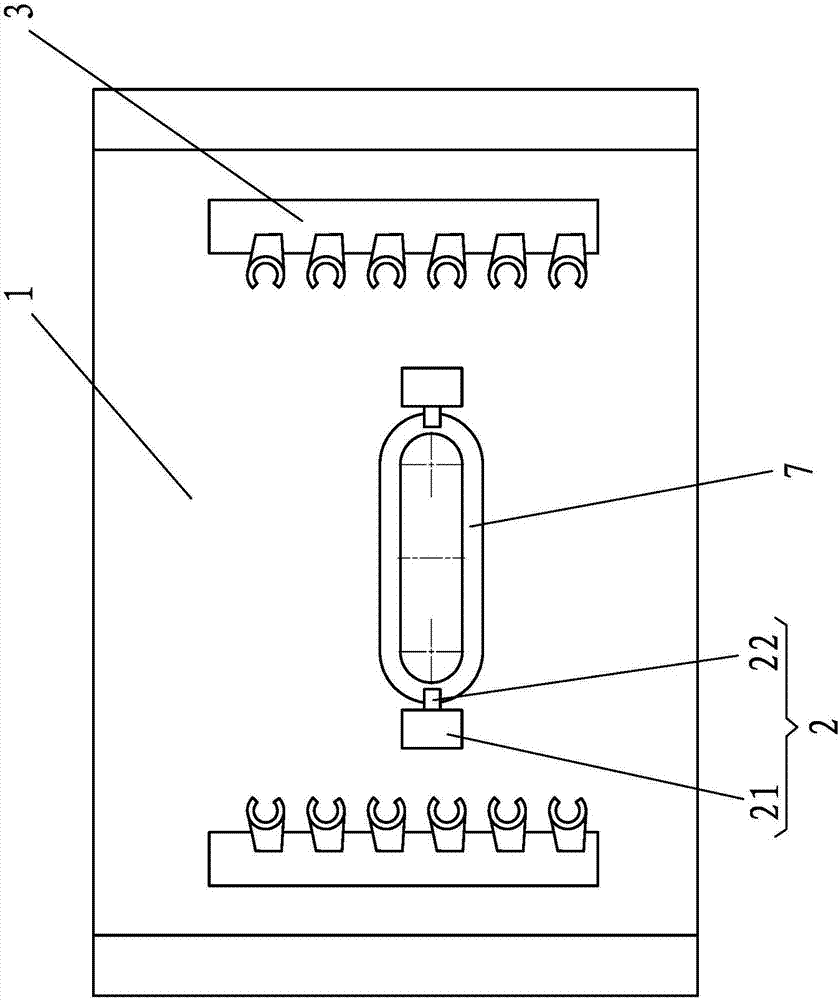
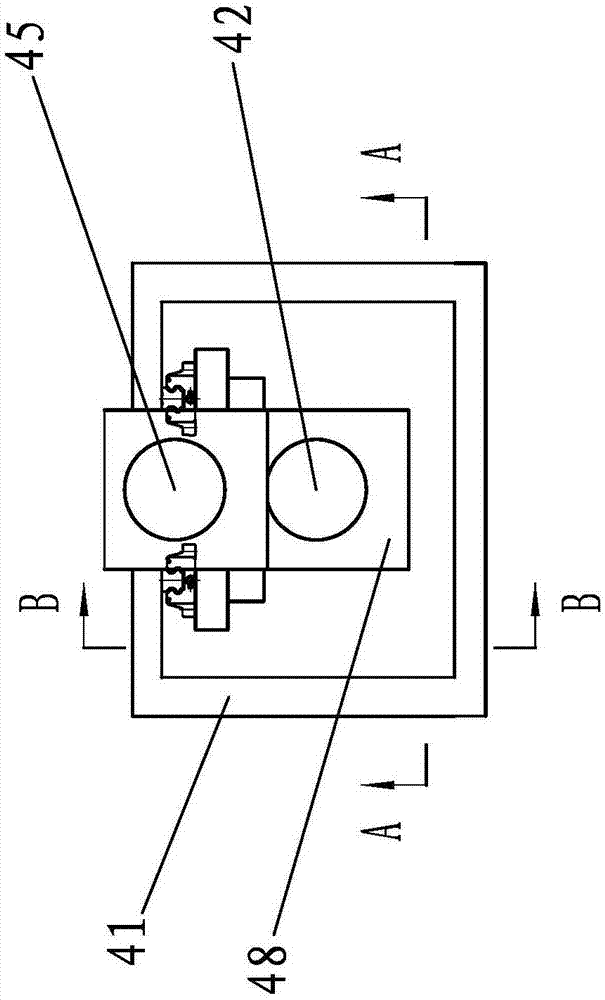
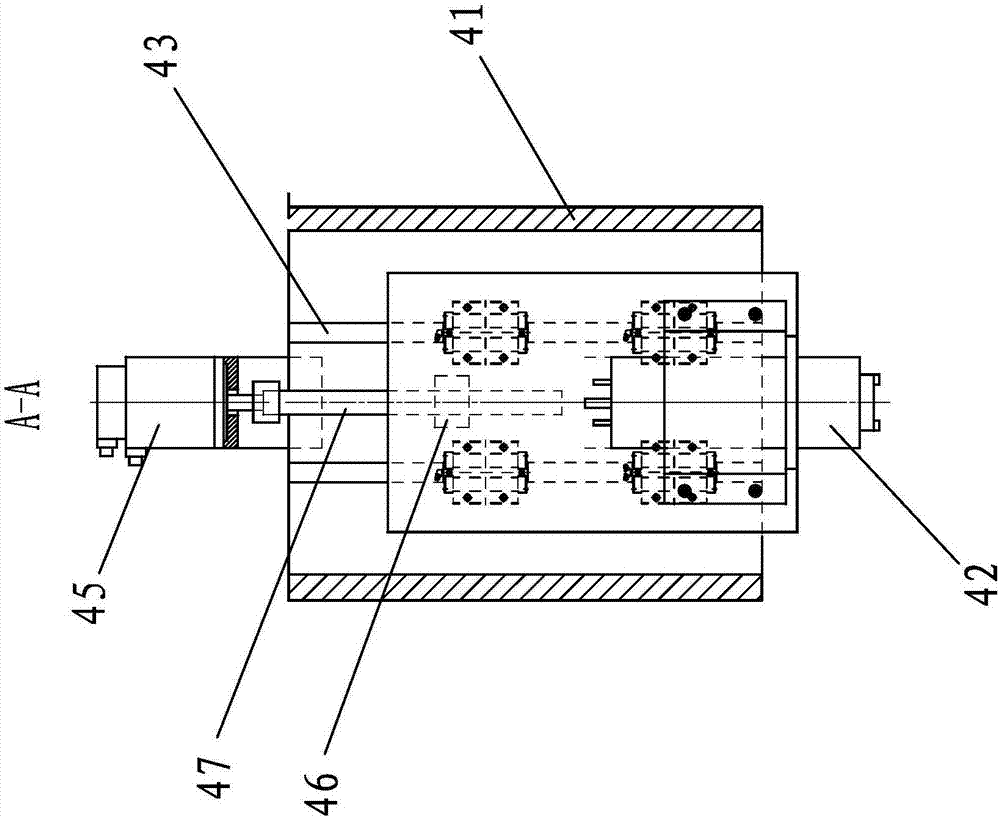
[0050] Such as Figure 1-5 As shown, the walking control system of the intelligent spider robot of the present invention includes a workbench 1 on which the stone to be processed is placed, and the workbench 1 is provided with a fixing device 2 for fixing the stone to be processed 7, The fixing device 2 is located in the middle of the table top of the workbench 1, and also includes a spider-type robot that crawls arbitrarily in all directions on the above-mentioned workbench table top, and the spider-type robot includes a processing mechanism for processing the stone to be processed and a traveling mechanism for urging the processing mechanism to move and process, and the processing mechanism is fixed on the traveling mechanism.
[0051] The walking control system of the intelligent spider robot of the present...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com