

Longitudinal acceleration control method based on MAP diagram and online calibration
A technology of longitudinal acceleration and MAP diagram, which is applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of automobile cost control, usability, and real-time control, and reduce system development time Effects of cost and economic cost, reduction of system development cost, and shortening of system development cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
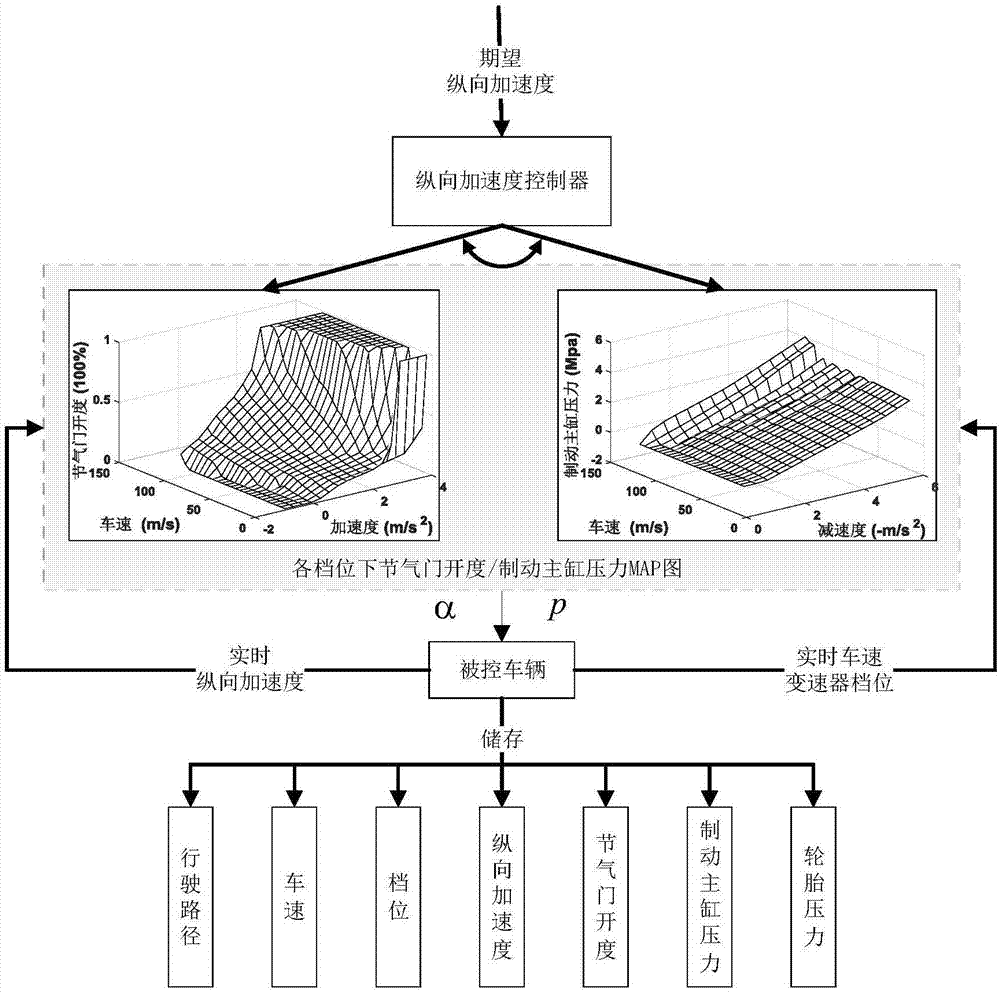
[0050] The invention designs a longitudinal acceleration control method based on MAP and online calibration for the following control of the longitudinal acceleration of the vehicle by the lower controller. The MAP diagram based on the parametric model can meet the real-time requirements of the control system while compensating the nonlinear characteristics of the system, and has certain versatility, which can reduce the economic and time costs caused by road tests. On the one hand, the online calibration process can correct the control error caused by the model and test accuracy through the collection and statistical analysis of the real-time running data of the vehicle; Control the MAP diagram for correction to ensure the control accuracy of the system and the stability of operation during the vehicle's service life. Concrete implementation scheme is as follows:
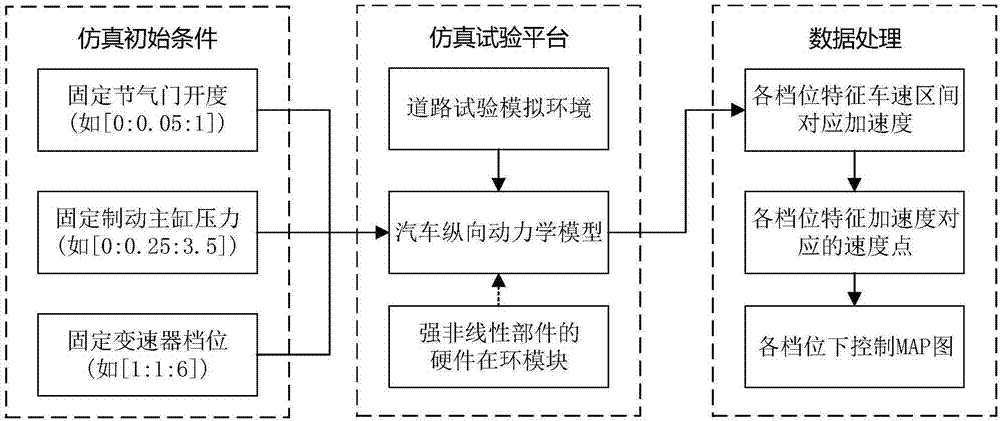
[0051] Step 1. Use the vehicle dynamics software to establish an accurate vehicle longitudinal dynamics paramet...
specific Embodiment
[0089] Taking a B-class car platform as an example, the road simulation experiment is carried out based on the Carsim platform
[0090] Step 1: Build a vehicle dynamics model.
[0091] According to the dynamic model in CarSim, select similar models of the same level (body shape and size, power system structure,) as the reference model. According to the structure of the vehicle dynamics model in CarSim, the characteristic parameters of system components such as body size, engine, transmission, final drive, tires, hydraulic brakes, etc. are input in sequence, and the longitudinal dynamic model of the experimental target vehicle is built.
[0092] Step 2: Build a simulated road experiment environment.
[0093] Build a simulated road experiment simulation environment in CarSim.
[0094] 2.1 Set up the simulation environment. In CarSim, set the Driver Controls in order to open the ring valve, brake pressure, fixed gear position, and driver path following mode; set the simulated r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More