Flexible tail end traction rehabilitation robot
A rehabilitation robot and terminal traction technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of increasing patient pain, patient injury, inaccurate adjustment of length, etc., to reduce rehabilitation time, labor intensity, occupation, etc. small space effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
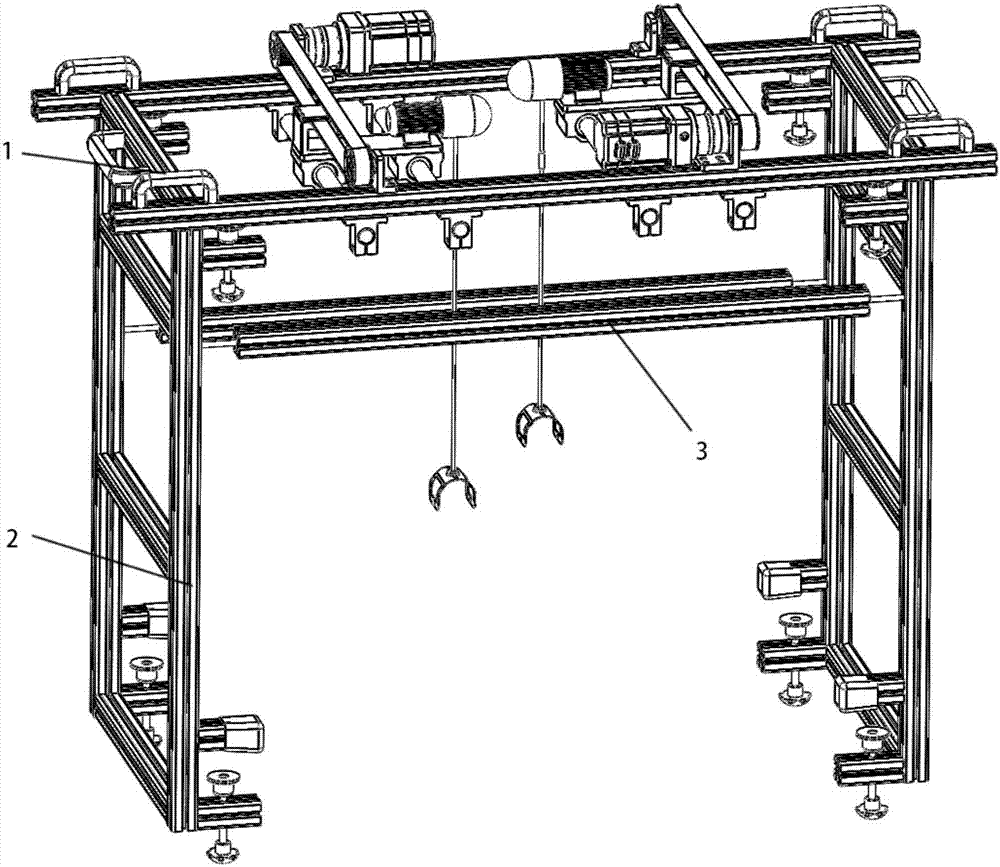
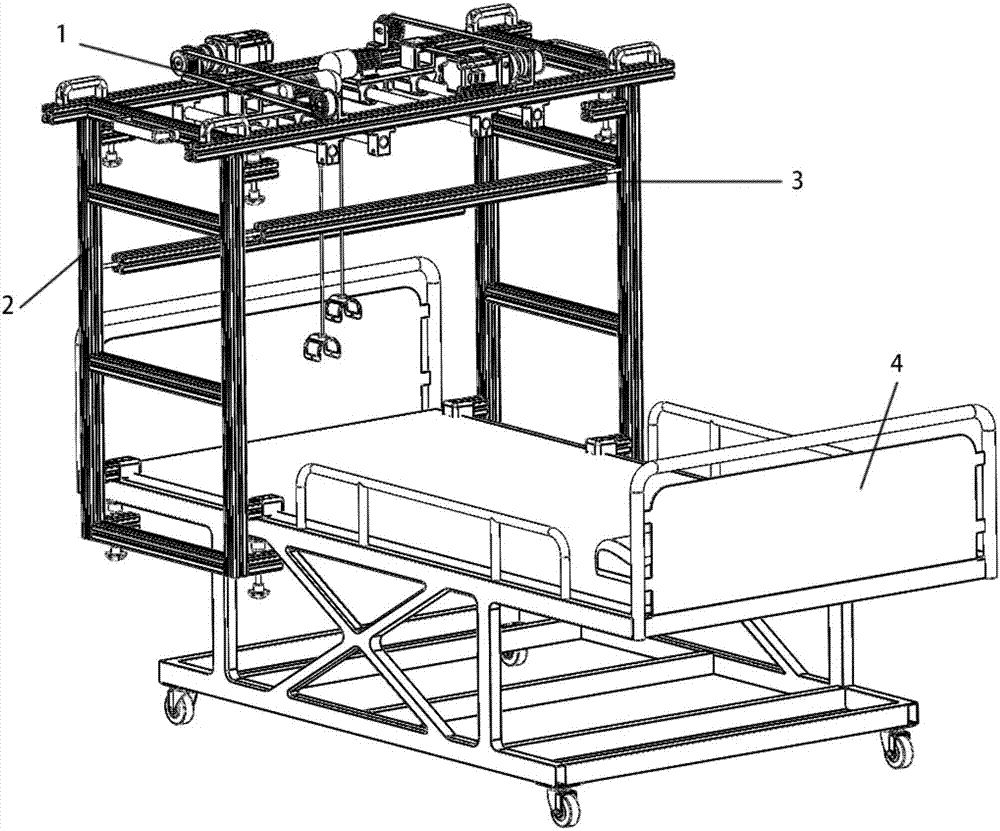
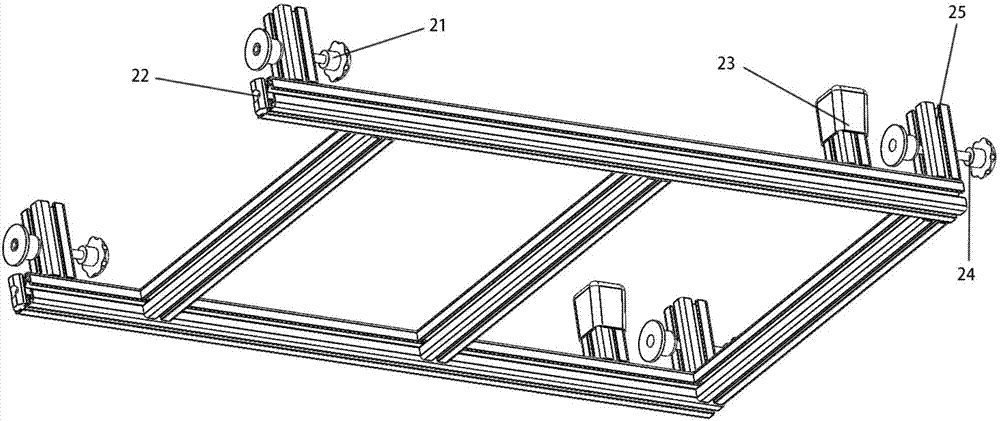
[0027] see Figure 1 to Figure 5 , this embodiment discloses a flexible terminal traction rehabilitation robot, including a mounting bracket 2 and a traction mechanism 1 arranged on the mounting bracket 2, the bottom of the mounting bracket 2 is clamped on the hospital bed 4, and the bottom of the mounting bracket 2 is The four corners are all provided with clamping parts, and the clamping parts include an upper clamping plate 23, a lower clamping plate 25, and a clamping bolt 24. The upper clamping plate 23 and the lower clamping plate 25 are arranged up and down oppositely and leave a gap. The tightening bolt 24...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com