

A fruit and vegetable robot picking transportation pipeline
A technology of transportation pipelines and robots, which is applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of easily smashing fruits, wasting working time, and synchronous movement, and achieve the effect of improving picking efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention. It should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
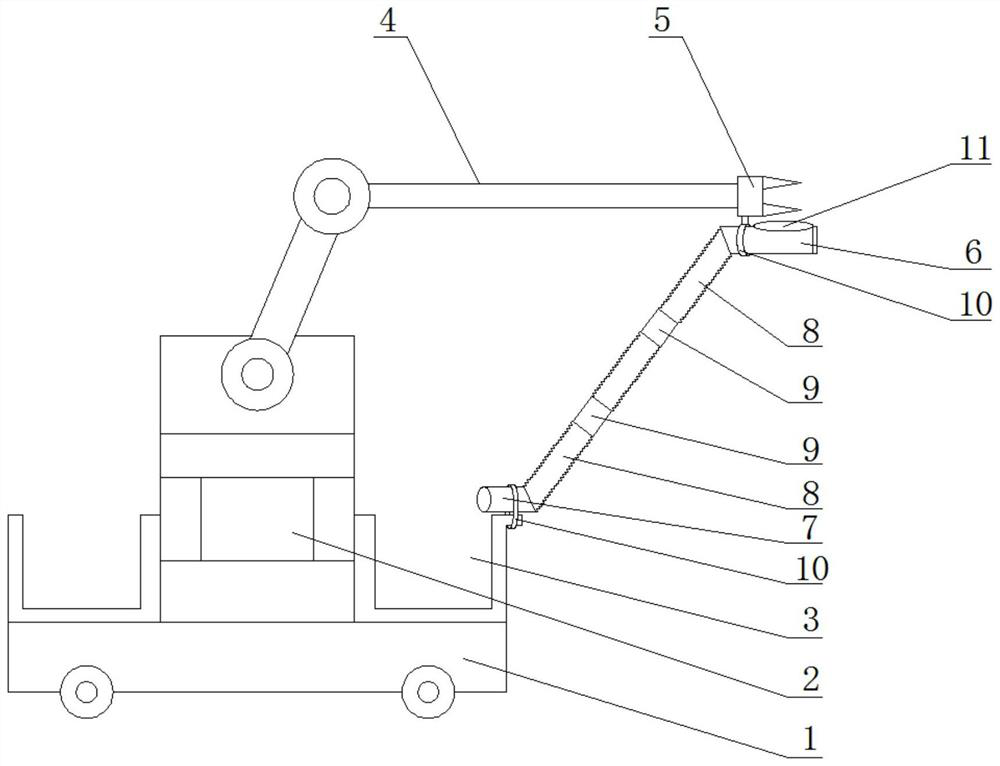
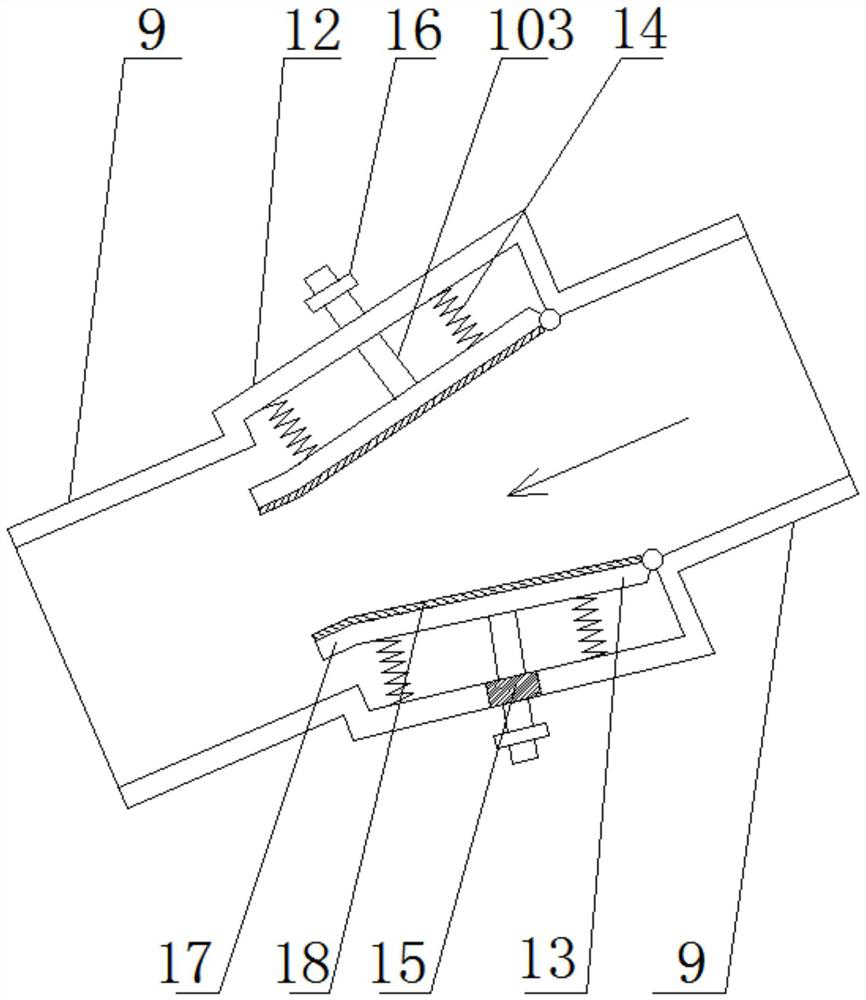
[0016] Such as figure 1 and figure 2 As shown, a fruit and vegetable robot picking transportation pipeline includes a movable base 1, a picking robot 2 installed on the base 1, a picking frame 3 installed on the base 1, a mechanical arm 4 installed on the picking robot 2 and an installation At the picker 5 at the front end of the mechanical arm 4, a picking transport pipeline is installed between the picking frame 3 and the picker 5; the picking transport pipeline includes an inlet pipe 6 at the front end, an outlet pipe 7 at the rear end, Several elastic bellows 8 between the pipe 6 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More