

Interventional surgical robot subordinate end and mobile platform and control method of robot subordinate end
A mobile platform and interventional surgery technology, applied in the field of minimally invasive vascular interventional surgery, can solve the problems that it is difficult to meet the cooperative operation requirements of catheters and guide wires, and it is difficult for robots to complete the coordinated operation of catheters and guide wires. It achieves light weight, simple structure, and transmission high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
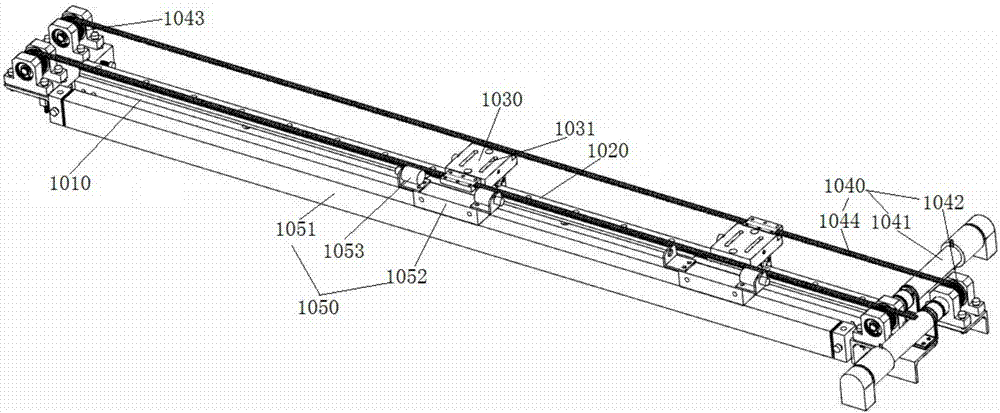
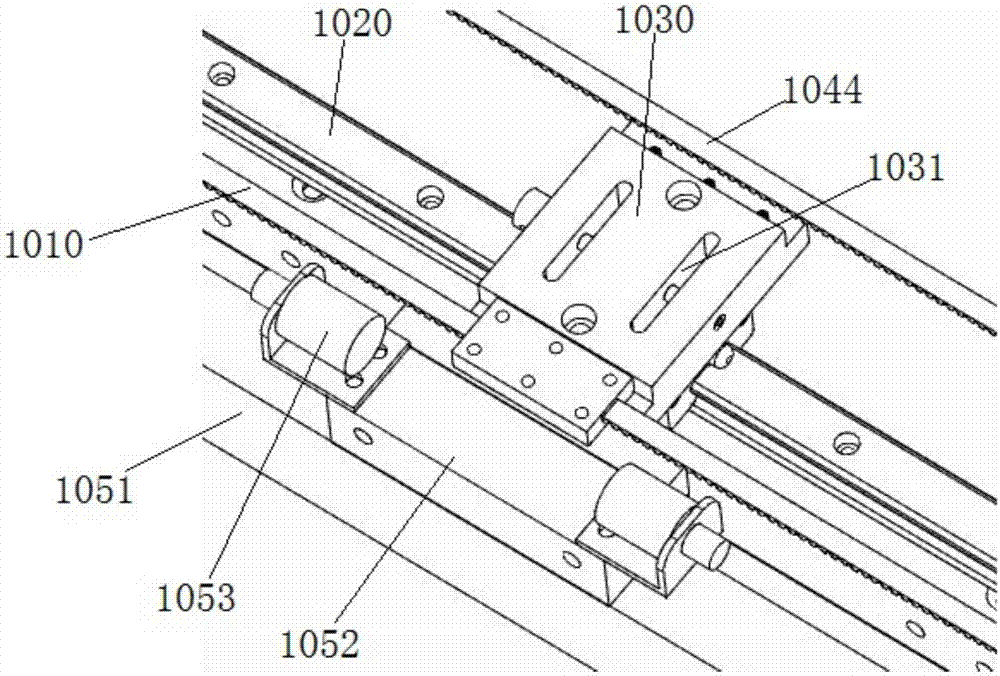
[0087] Such as figure 1 , figure 2 As shown, this embodiment provides a mobile platform, which includes a platform main beam 1010, a platform connecting block 1030, a platform driving mechanism 1040, and a position detection mechanism 1050; wherein, the platform connecting block 1030 is arranged on the platform main beam through a linear guide rail pair D1020 1010, the linear guide rail pair D1020 includes a slide rail installed on the main beam of the platform 1010 and a slider matched with the slide rail, the platform connection block 1030 is installed on the slider, and the platform connection block 1030 is used to install the catheter controller or guide wire Controller; the catheter controller and the guide wire controller have corresponding structures in the prior art, the catheter controller is used to clamp the catheter and detect the rotation and push force of the catheter, and the guide wire controller is used to clamp the guide wire and perform detection on the gui...
Embodiment 2
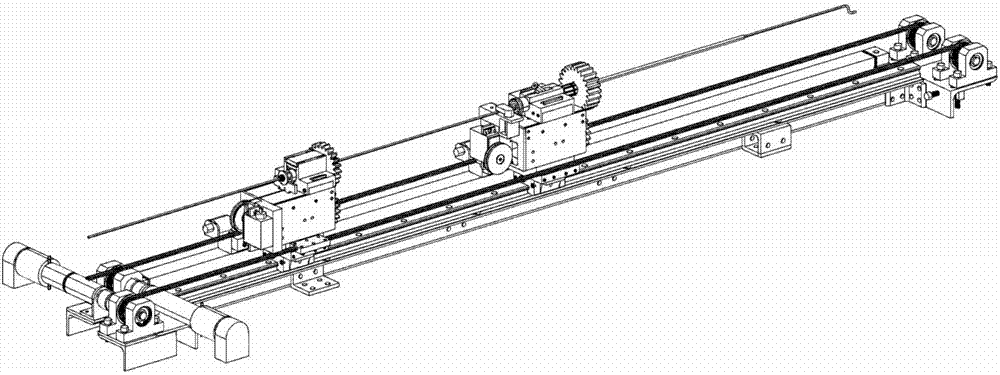
[0092] Such as image 3 As shown, this embodiment provides a slave end of an interventional surgery robot, which mainly includes a catheter controller, a guide wire controller, and the mobile platform in Embodiment 1. The catheter controller and the guide wire controller are respectively installed on two platforms Connection block 1030 on. The structure of the mobile platform has been described in detail in Embodiment 1. This embodiment improves the structures of the catheter controller and the guidewire controller. The structures of the catheter controller and the guidewire controller will be described in detail below.
[0093] 1. Structure of catheter controller
[0094] Such as Figure 4 As shown, the catheter controller mainly includes five parts, which are the main part 1, the guide wire auxiliary clamping mechanism 2, the catheter clamping mechanism 3, the catheter twisting assembly 4 and the catheter force measuring assembly 5; wherein, the main part 1 is other The i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More