

Initial self-aligning method for inertial platform under static base
An inertial platform and self-alignment technology, which is applied in the field of inertial navigation and can solve problems such as long alignment time, deviation of alignment results, and impact of missile response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
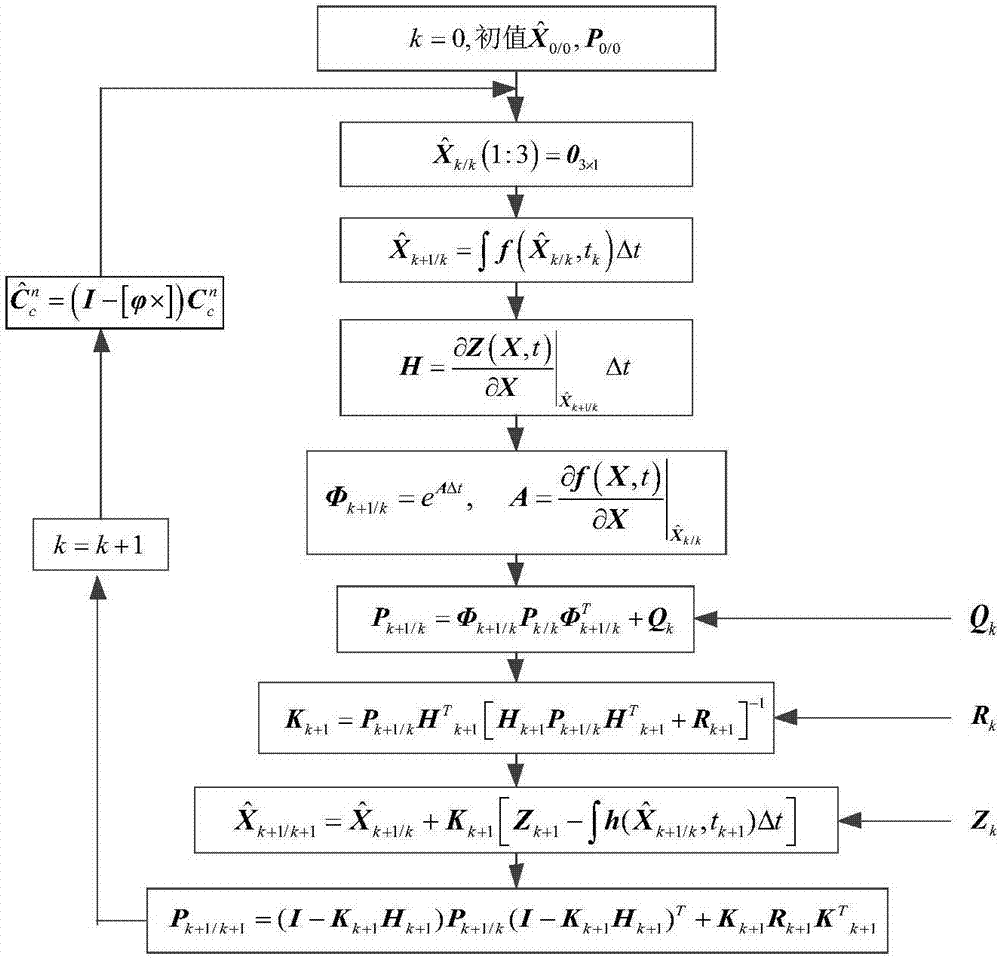
[0096] Below in conjunction with accompanying drawing and embodiment, describe technical solution of the present invention in detail:
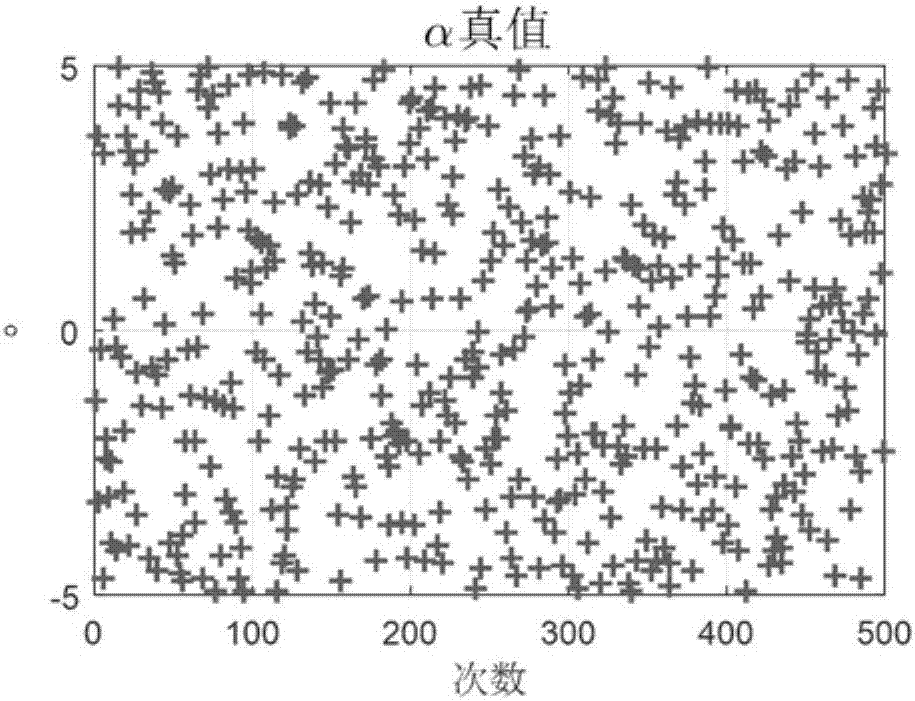
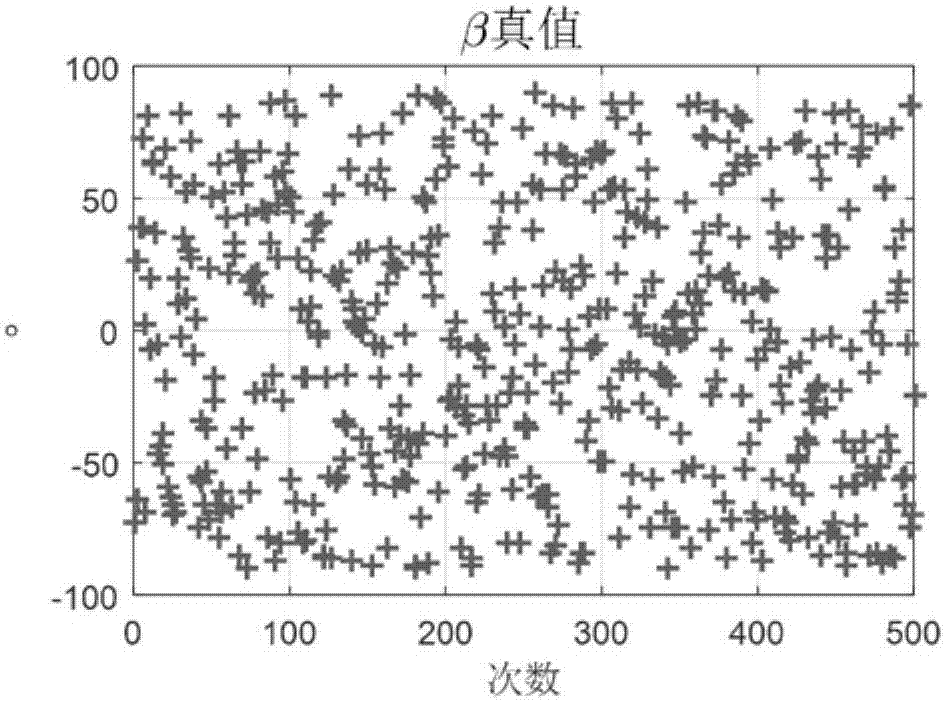
[0097] It is assumed that the inertial platform has been calibrated and compensated before leaving the factory and the residual error is small. Set the initial attitude angle of the platform and the platform system parameters as random quantities, where the horizontal attitude angle is within ±5 ° Internal random distribution, azimuth within ±180 ° randomly distributed inside. The gyroscope zero bias variance is 0.01° / h, and the accelerometer zero bias variance is 100ppm.
[0098] In the simulation, the sampling period is 0.1s, the moment instruction generation period is 0.1s, the filtering period is 1s, the accelerometer measurement noise is 0.1μg, the equivalent error is 0.1μg, and the gyroscope measurement noise is 0.001° / h. The initial value of the attitude angle of the filter is the rough alignment result, the other initial values ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More