

Underground space autonomous positioning multi-sensor intelligent detection robot
An autonomous positioning, multi-sensor technology, applied in instruments, motor vehicles, measuring devices, etc., can solve the problems of inability to travel in complex terrain, single detection attribute, etc., and achieve the effect of low equipment cost, simple operation and reasonable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in various ways defined and covered by the claims.
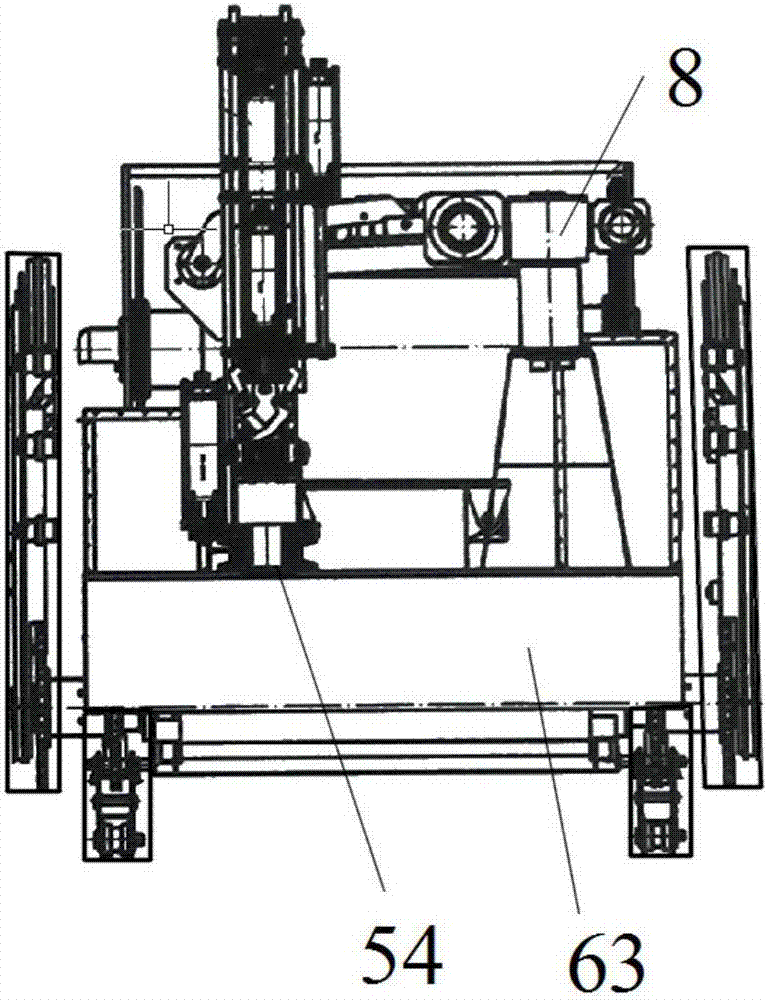
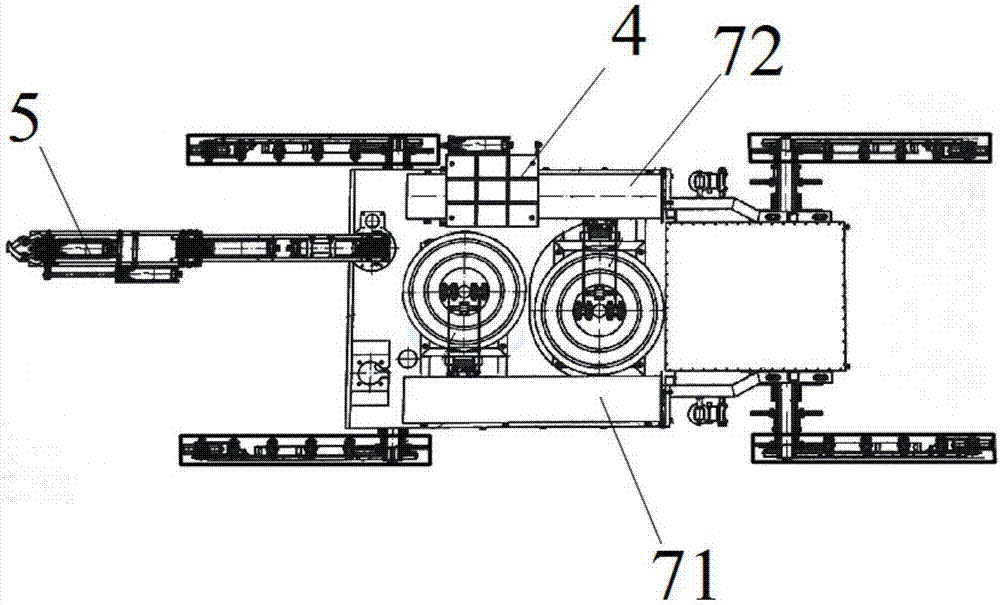
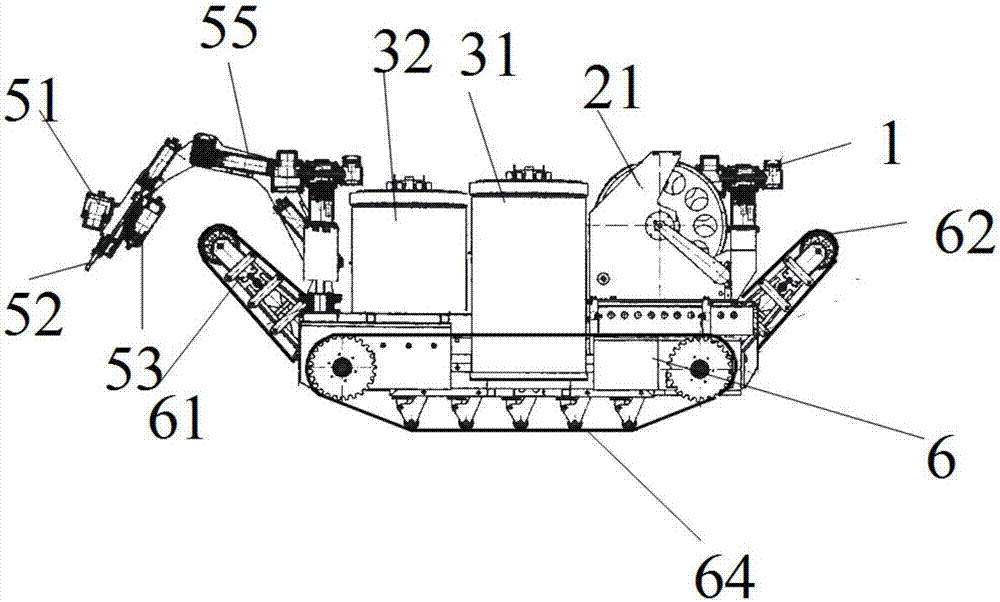
[0074] see figure 1 , figure 2 and image 3 A multi-sensor intelligent detection robot with autonomous positioning in underground space, comprising a robot carrier platform 6, a main control box 9, and a rear camera 1, a mechanical arm 5, an instrument warehouse 3, Sampling basket 4, battery pack 7, front camera 8, crawler belt, rolling wheel 2 modules. The rear camera 1 and the front camera 8 can rotate 360° horizontally and 360° vertically; the camera support is divided into upper and lower parts, and the upper part can be driven by a motor to rotate 360° around the central axis. The side LED light source, the camera and the LED light source can all be rotated vertically and synchronously for 360° around the horizontal central axis of the part on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More