Velocity composition based non-force-fighting differential mechanism
A technology of speed synthesis and differential, which is applied in the direction of differential transmission, transmission parts, belts/chains/gears, etc. It can solve the problems of large moment of inertia, high control accuracy of dispute control unit, and very high requirements, and achieve low inertia , avoidance force dispute phenomenon, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] A power-dispute-free differential based on speed synthesis of the present invention will be described in detail below with reference to the drawings and embodiments.
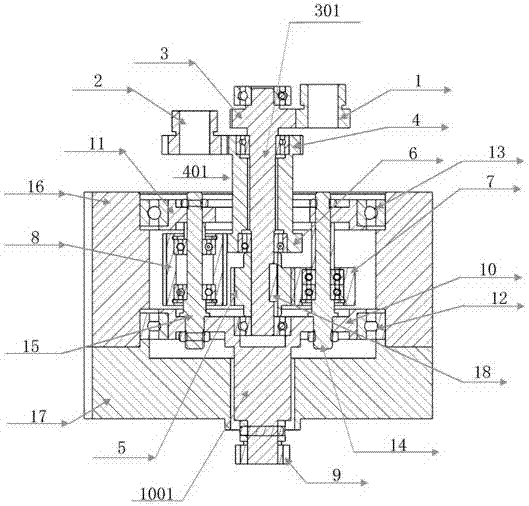
[0027] Such as figure 1 As shown, the differential of the present invention mainly includes a first input gear 1, a second input gear 2, a first coaxial gear 3, a second coaxial gear 4, a small sun gear 5, a large sun gear 6, and short planetary gears 7. Long planetary gear 8, output gear 9, planetary carrier 10, cage 11, planetary carrier support bearing 12, cage support bearing 13, short planetary wheel pillar 14, long planetary wheel pillar 15, supporting shell 16 and shell end cap 17.
[0028] Wherein, the first input gear 1 is used for inputting rotation, and the first input gear 1 meshes with the first coaxial gear 3 . The first coaxial gear 3 and the small sun gear 5 are coaxial, and the two are respectively fixedly installed on the two ends of the first transmission shaft 301, so that the first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More