

Study-based guaranteed preset performance cluster flight distribution attitude tracking control method
A distributed controller and preset performance technology, which is applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the difficulty of estimating/measuring the inertial matrix parameters of spacecraft and the complicated design of distributed attitude controllers problems such as high degree of difficulty and limitation, to achieve the effect of improving robustness and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
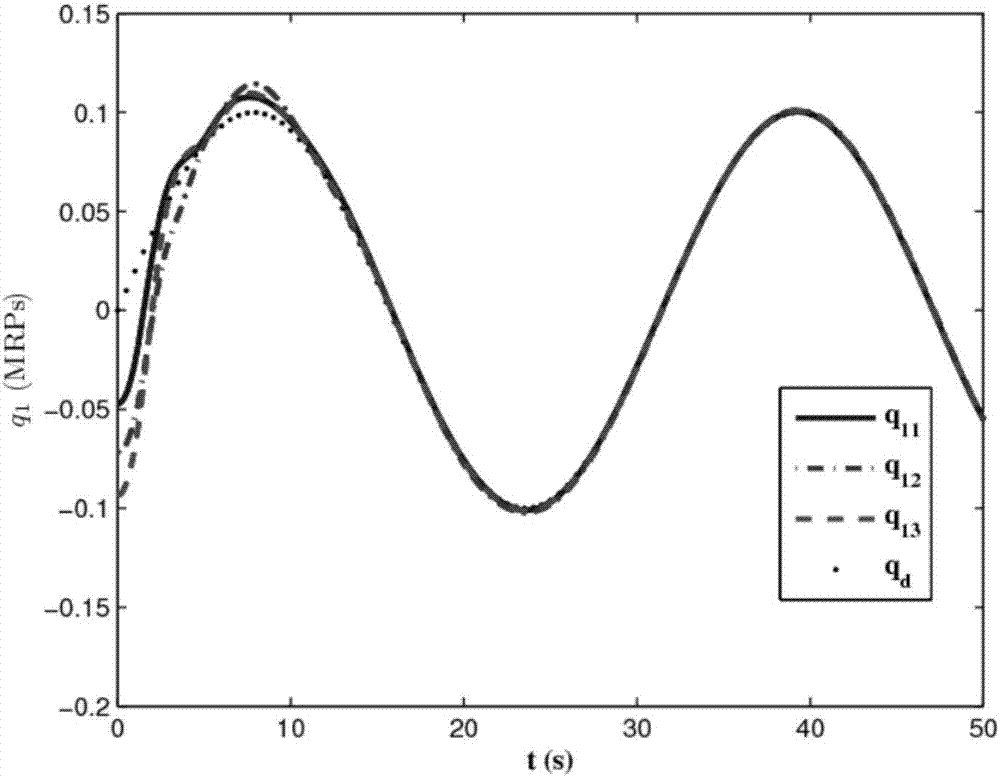
[0089] Parameter κ for all preset properties 1,i ,κ 2,i ,ρ 1,i∞ ,ρ 2,i∞ ,l 1,i ,l 2,i(i=1,...,4) are taken as:
[0090] 1,1,0.001,0.001,0.018,0.018
[0091] The inertia matrix parameters of the four slave spacecraft are
[0092]
[0093] The controller gain is: K e,i =diag{10,10,10,10},K s,i =diag{30,30,30,30},λ i Take it as the identity matrix. Evaluation - The number of hidden layer nodes in the execution layer is 10, and the initial values of the weight parameters of the input layer and hidden layer, as well as the hidden layer and output layer are arbitrarily selected in the interval [-0.5,0.5], [-0.3,0.3] . The discount parameter factor is 0.95, and the evaluation-execution network training tolerance is 10 -7 , a single training cycle is 200 steps. The boundary of the control input is less than or equal to 2N.m, and the external disturbance torque added in the simulation process is:
[0094] [0.12sin(0.1t), 0.06sin(0.15t), 0.08sin(0.1t)] T
[0095] Ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More