

Unmanned aerial vehicle intelligent perception system and method based on multiple sensors
An intelligent perception, multi-sensor technology, applied in the field of computer vision, can solve the problems of unstable GPS signal, low positioning accuracy, signal occlusion, etc., to achieve the effect of fast calculation, high real-time performance and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
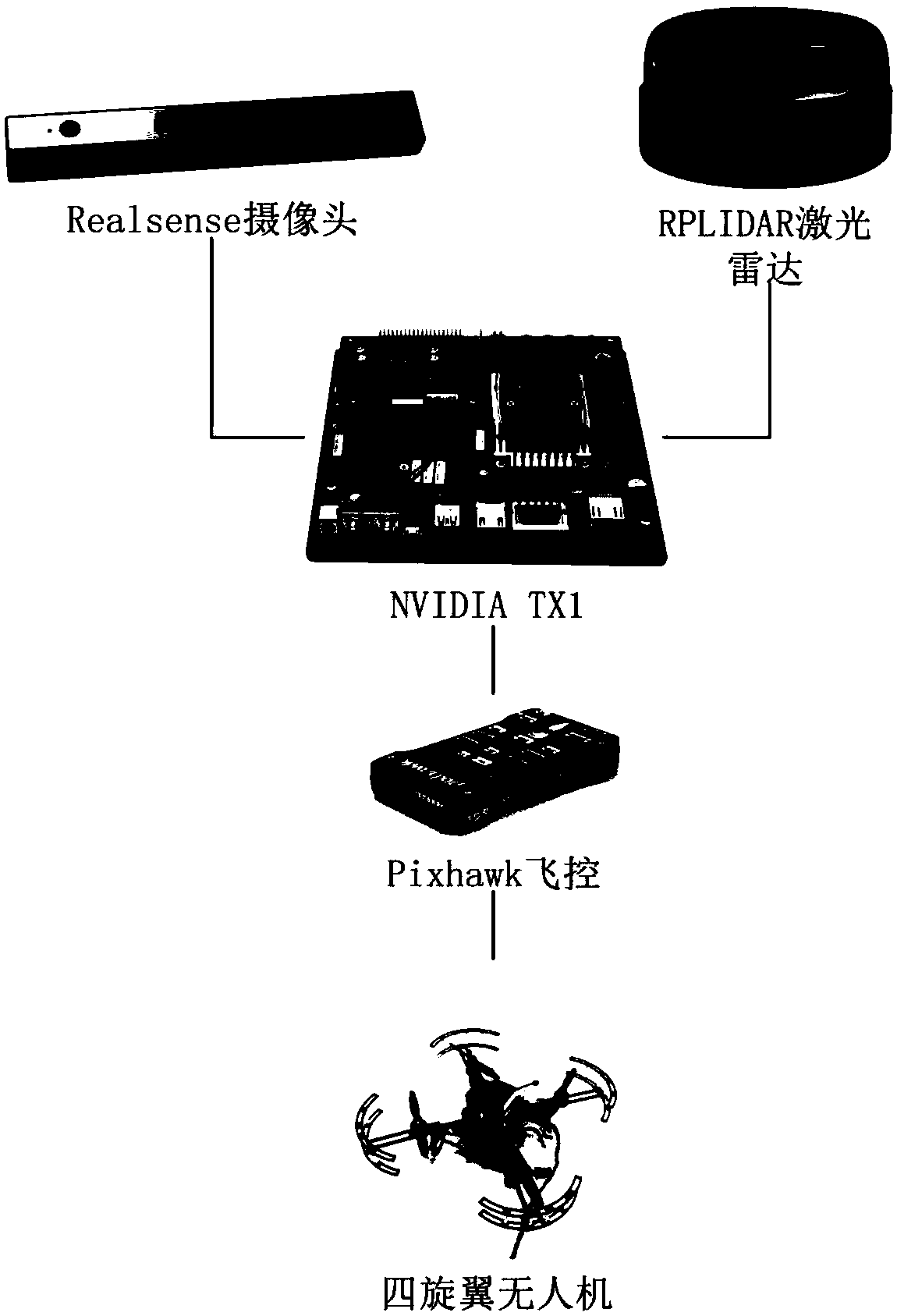
[0036]The multi-sensor based UAV intelligent perception system proposed by the present invention mainly includes laser radar, RGB-D visual sensor, IMU inertial measurement unit, embedded onboard processor and flight controller. LiDAR is mainly used to measure the distance information of the surrounding environment, with high measurement accuracy, large coverage, and strong anti-interference; RGB-D visual sensor can collect distance information and image information of the surrounding environment. The lidar collects 2D point cloud data, while the RGB-D vision sensor collects 3D point cloud data. The point cloud data contains richer feature information of the target object, which can improve the robustness of the target recognition system. The IMU inertial measurement unit is a device for measuring its own three-axis attitude angle and acceleration. The present invention directly uses the IMU sensor in the flight controller. The flight controller is mainly used to stabilize the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More