

Rectangular coordinate robot iteration sliding mode cross coupling control method
A Cartesian coordinate and cross-coupling technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve three-axis synchronization, limited trajectory tracking and contour error control, affect three-axis synchronization, trajectory tracking accuracy, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0091] combine Figure 1 to Figure 7 , a Cartesian robot iterative sliding mode cross-coupling control method, the control method includes the following process:
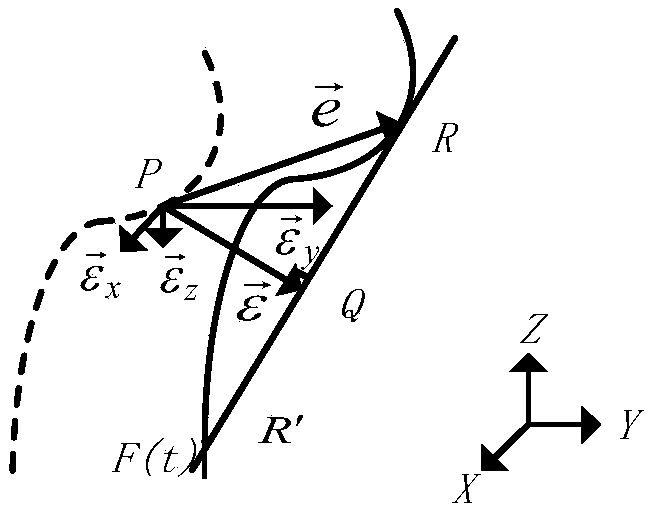
[0092] The establishment process of the contour error model of the Cartesian robot is as follows:
[0093] assuming t 0 time, in the Cartesian coordinate system, P is the actual position of the end effector, the coordinates are (a, b, c), F(t) is the expected trajectory, R is the expected position, and the coordinates are (x 1 ,y 1 ,z 1 ),but is the tracking error vector of the Cartesian robot, denoted as Its projections on the three axes are respectively e x 、e y 、e z , that is, the tracking error of each of the three axes; the R′ coordinate is (x 0 ,y 0 ,z 0 ), the straight line RR' is the tangent line of the trajectory F(t) at R; draw a perpendicular line from P to the straig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More