

Multi-mechanical-arm collaborative offline programming method based on RoboDK
An off-line programming, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as obvious engineering transformation efficiency, lack of collaborative control schemes, and poor operation results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be described in further detail below in conjunction with the accompanying drawings.
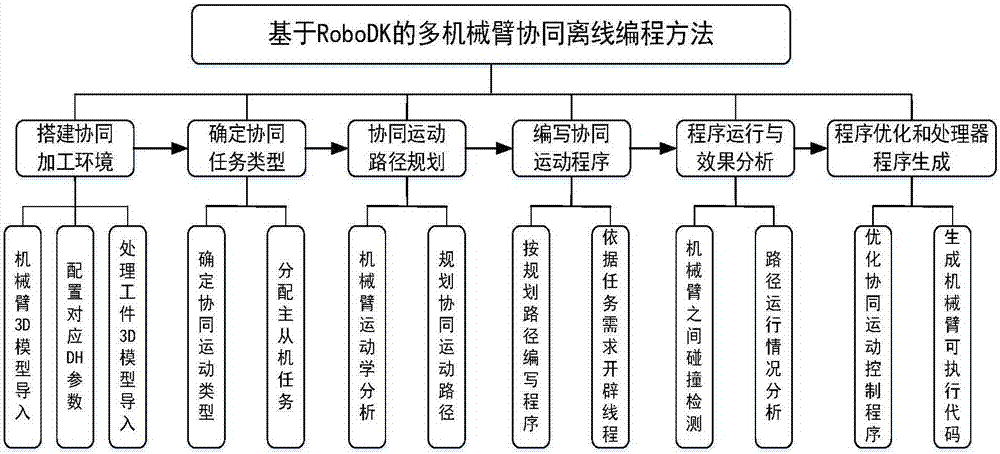
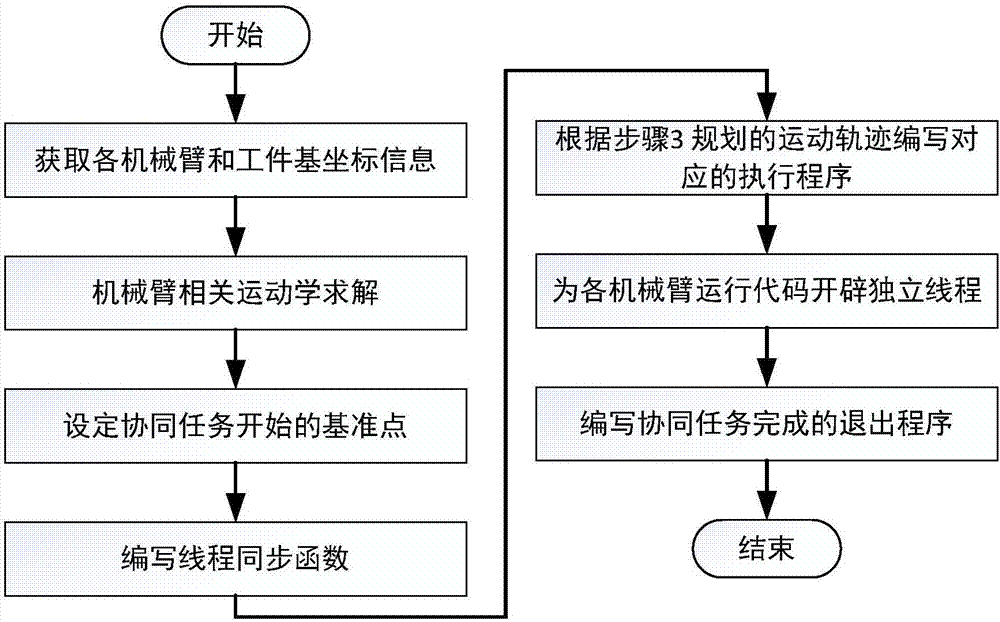
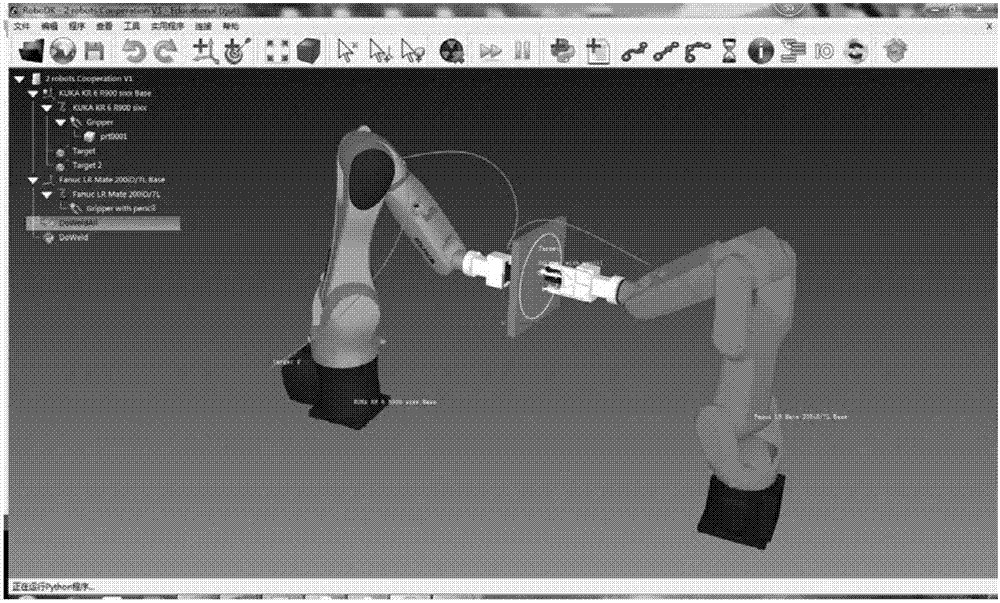
[0054] The present invention aims at the imperfection and lack of function of the current multi-manipulator collaborative offline programming method, and considers the urgent need of the manufacturing industry 2025 to improve the processing ability of industrial robots. Based on the RoboDK platform and combined with its secondary developed API function, a relatively The perfect collaborative off-line programming method for manipulators improves the efficiency of off-line programming development for collaborative control and greatly enhances the strength of manipulators in the field of production and processing. The present invention first imports the 3D models of the robotic arm, end effector, and processed workpiece into the RoboDK visualization interface, configures the DH parameters of the robotic arm to establish a complete robotic arm simulation model, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More