

Indoor robot trajectory tracking system and method based on nine-axis inertial sensor
An inertial sensor, trajectory tracking technology, applied in instruments, electric controllers, controllers with specific characteristics, etc., can solve the problems of limited application, inability to obtain information, and expensive equipment, and achieve the effect of eliminating noise interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings.
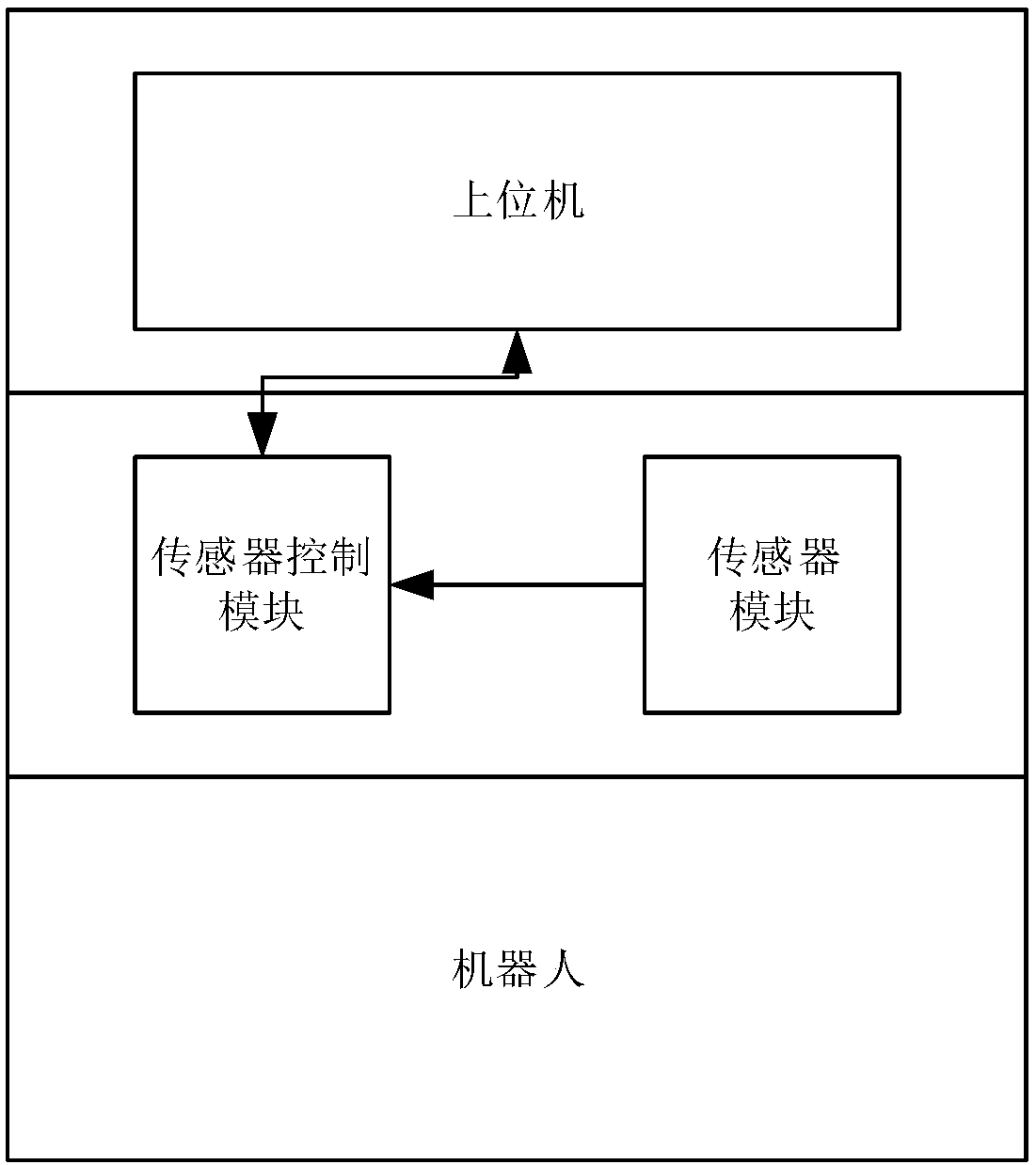
[0084] refer to figure 1 , is a schematic structural diagram of a robot indoor trajectory tracking system based on a nine-axis inertial sensor of the present invention. The robot indoor trajectory tracking system based on the nine-axis inertial sensor includes a movable robot, a sensor module, a sensor control module and a host computer. The sensor module adopts a nine-axis inertial sensor integrating a three-axis accelerometer, a three-axis gyroscope and a three-axis magnetometer, or a six-axis inertial sensor integrating a three-axis accelerometer, a three-axis gyroscope and a separate three-axis magnetometer. To form a nine-axis inertial sensor, or use a separately packaged three-axis accelerometer, three-axis gyroscope and three-axis magnetometer, the sensor module transmits data with the sensor control module through RS232 serial commun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More