

Path planning method and device, and inspection robot
An inspection robot and path planning technology, applied in the electric power field, can solve problems such as low inspection efficiency and inability to realize autonomous inspection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
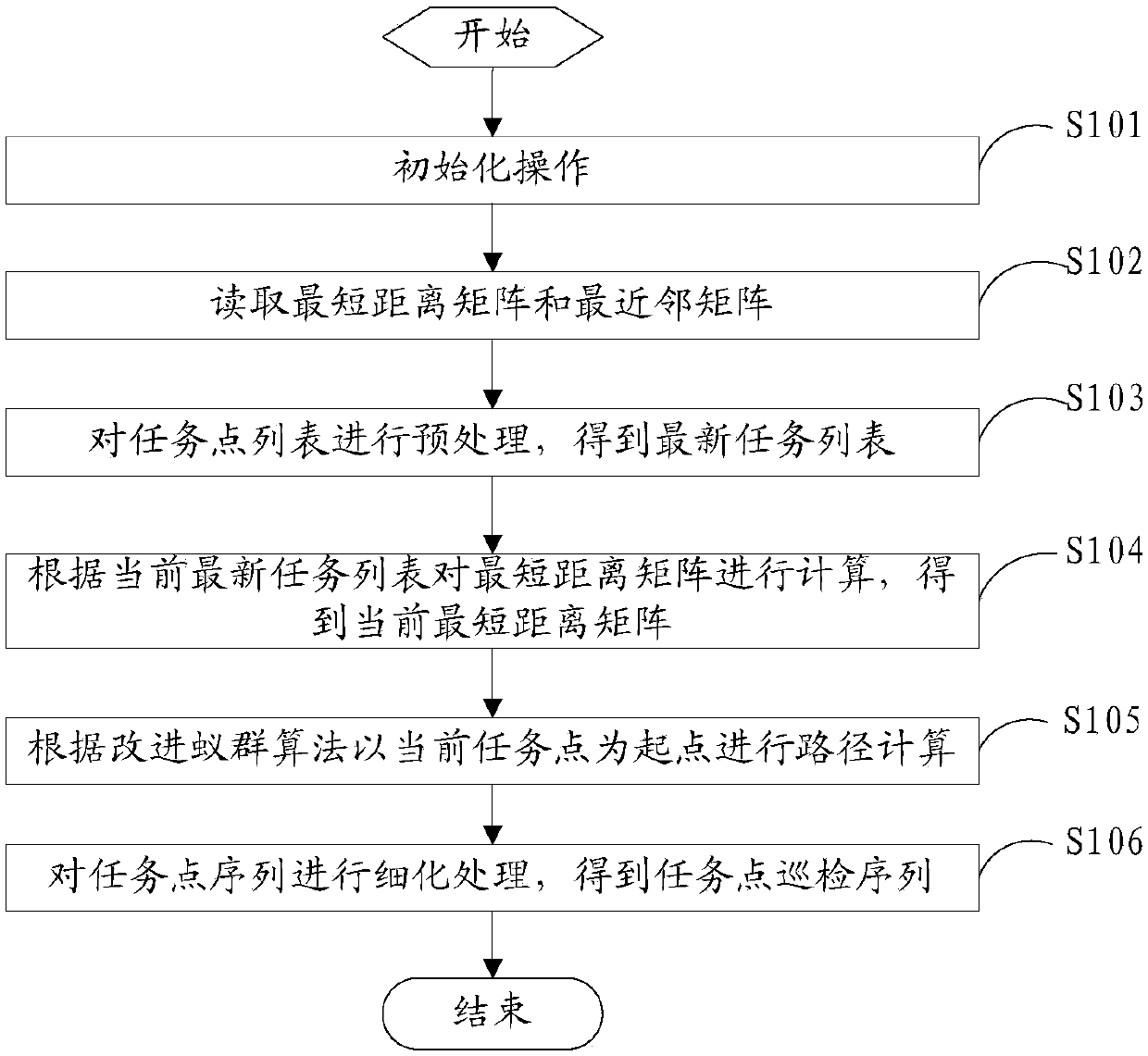
[0061] figure 1 It is a flow chart of the steps of an embodiment of a path planning method provided by the present invention,
[0062] like figure 1 As shown, the path planning method provided in this embodiment is applied to the inspection robot of the substation, which is used to enable the inspection robot to conduct autonomous inspection of the substation according to the planned path, so as to get rid of relying on the operator to perform inspection by remote control fetters, the path planning method includes steps:
[0063] S101: initialization operation.
[0064] That is to initialize all the information required for path planning, the so-called initialization includes determining the initial information required for path planning. The information here is the information of the substation that the inspection robot inspects, including the number and number of all stops and all task points, and also includes the task start point, task end point, task point list and the...
Embodiment 2
[0086] figure 2 It is a flow chart of steps in another embodiment of the path planning method provided by this application.
[0087] like figure 2 As shown, the path planning method provided in this embodiment is applied to the inspection robot of the substation, which is used to enable the inspection robot to conduct autonomous inspection of the substation according to the planned path, so as to get rid of relying on the operator to perform inspection by remote control fetters, the path planning method includes steps:
[0088] S201: initialization operation.
[0089] That is to initialize all the information required for path planning, the so-called initialization includes determining the initial information required for path planning. The information here is the substation information and task information that the inspection robot inspects, including the number and number of task points, task start point, task end point, task point list and application mode.
[0090] T...
Embodiment 3
[0128] image 3 It is a structural block diagram of an embodiment of a path planning device provided by the present invention.
[0129] like image 3 As shown, the path planning device provided by this embodiment is applied to the inspection robot of the substation, which is used to enable the inspection robot to conduct autonomous inspection of the substation according to the planned path, so as to get rid of relying on the operator to perform inspection by remote control The path planning device specifically includes an information initialization module 10 , a matrix reading module 20 , a list processing module 100 , a matrix calculation module 30 , a path calculation module 40 and a refinement processing module 50 .
[0130] The information initialization module is used to initialize the signal.
[0131] That is to initialize all the information required for path planning, the so-called initialization includes determining the initial information required for path planning...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More