

Power-reaching-law-based sliding-mode controlled magnetic suspension train system control method
A technology for maglev trains and control methods, which is applied in the general control system, control/regulation system, adaptive control, etc., can solve the problems of open-loop instability of the maglev train system, fluctuations in the position of levitation objects, and poor adaptability to parameter changes, etc., to achieve The effects of small overshoot, small position signal error, and smooth speed tracking curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
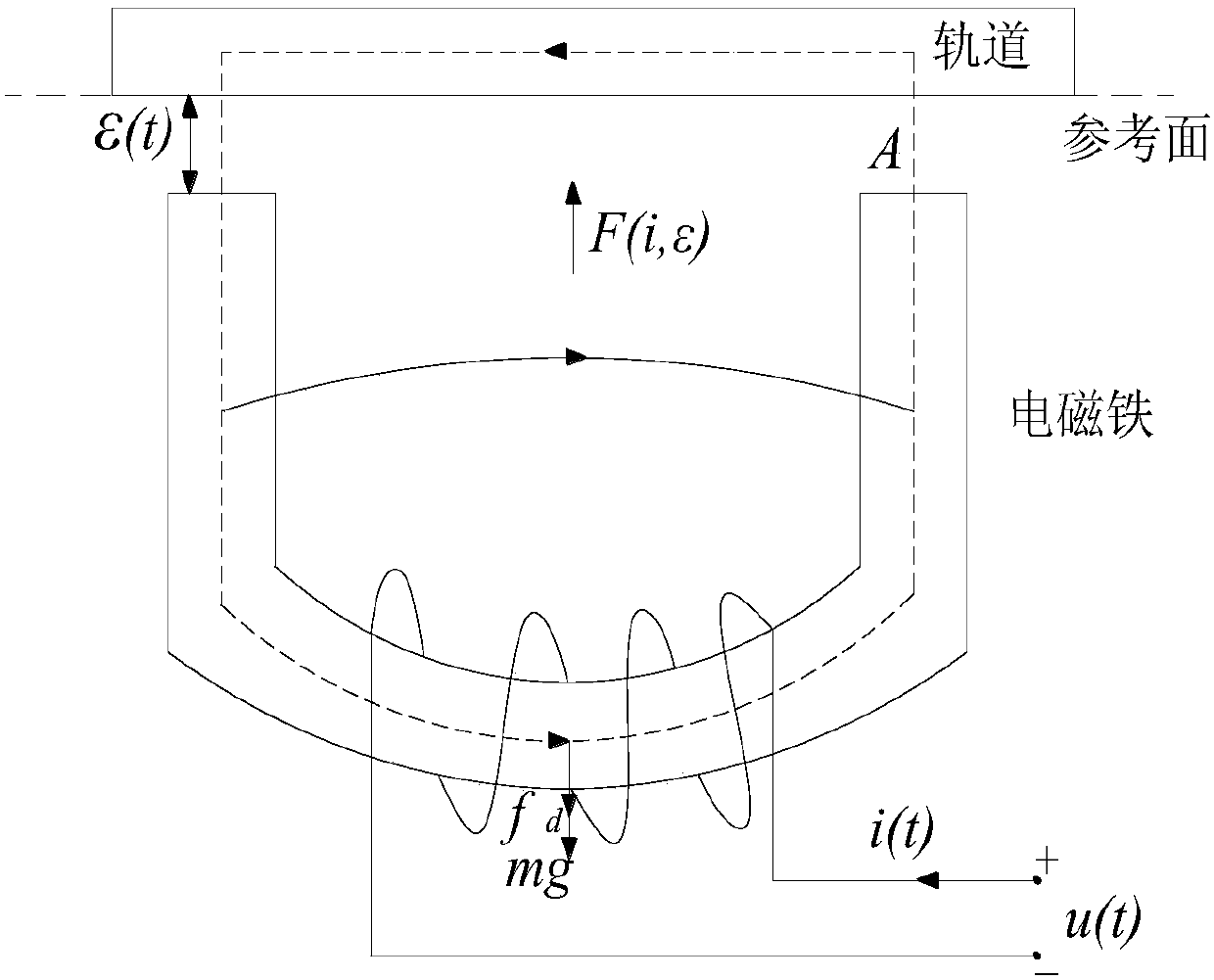
[0060] 1. First introduce the model of the maglev train system.
[0061]At present, the typical structure of the magnetic levitation system is mainly divided into the constant conduction attraction type and the superconduction repulsion type. In 1969, Germany took the lead in researching the TR series of constant conduction magnetic suspension trains. Japan then developed the HSST constant conduction suction type medium and low speed magnetic levitation trains and launched the superconducting MLX01 in 1972. Shanghai, my country introduced German technology in 2003 and designed it. The Shanghai maglev train and the self-developed Changsha maglev train in 2015 are both constant conduction maglev trains. The magnetic levitation train system of this kind of constant suction type is composed of multiple single magnet structures. In this paper, the single magnet structure of the maglev train is studied. The schematic diagram is as follows figure 1 , which is mainly composed of suspe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More